品牌:西门子
起订:1件
供应:1件
发货:1天内
信息标签:西门子6ES7288-2DT32-0AA0,供应,电子、电工,电子元器件及组件
点击这里进行电话呼叫
点击这里QQ咨询
联系时一定要说在【贸易商务资源网】看到的将给您优惠!如果您也想和该公司一样在网站发信息有好排名,点击立即免费注册,发布产品推广。

siemens/西门子授权合作伙伴
全新原装 质量保证 价格优势
 公司大量现货!!!
公司大量现货!!!
【同样的价格、同样的品牌、给您不一样的服务】
长沙?励自动化设备有限公司(西门子系统集成商)长期销售西门子S7-200/300/400/1200PLC、数控系统、变频器、人机界面、触摸屏、伺服、电机、西门子电缆等,并可提供西门子维修服务,欢迎来电垂询
联系人: 张亮 (销售经理)
手机 : 13548747710
QQ : 809118149
地址:长沙市岳麓区雷锋大道468号金科**城16-1603室
| 产品 | |
| 商品编号(市售编号) | 6ES7288-2DT32-0AA0 |
| 产品说明 | SIMATIC S7-200SMART, DIGITAL I/O SM DT132,16DI/16DO, 16DI DC 24 V, SINK/SOURCE, 16DO, TRANSISTOR 0.75A |
| 产品家族 | 订货数据总览 |
| 产品生命周期 (PLM) | PM300:有效产品 |
| 价格数据 | |
| 价格组 / 总部价格组 | IT / |
| 列表价(不含增值税) | 显示价格 |
| 您的单价(不含增值税) | 显示价格 |
| 金属系数 | 无 |
| 交付信息 | |
| 出口管制规定 | AL : N / ECCN : EAR99H |
| 工厂生产时间 | 22 天 |
| 净重 (Kg) | 0.26 Kg |
| 产品尺寸 (W x L X H) | 未提供 |
| 包装尺寸 | 未提供 |
| 包装尺寸单位的测量 | 未提供 |
| 数量单位 | 1 件 |
| 包装数量 | 未提供 |
| 其他产品信息 | |
| EAN | 6940408101418 |
| UPC | 未提供 |
| 商品代码 | 85389091 |
| LKZ_FDB/ CatalogID | ST72-CN |
| 产品组 | 4051 |
| 原产国 | 中国 |
用户通过以下步骤可创建以太网接口的西门子触摸屏与S7-200 SMART CPU的以太网通信,在此以设备Smart 1000 IE为例。
在WinCC flexible的主工作窗口中添加与CPU的连接与上文中RS485接口的西门子触摸屏类似,在此不再赘述。下面主要介绍连接参数设置及下载项目等。
设置连接参数,首先选择Smart 1000 IE的接口为“以太网”,即触摸屏的以太网接口。选中该接口后,该接口的参数设置窗口将在其下方自动显示。设置触摸屏的IP地址为192.168.2.5,该IP地址必须与Smart 1000 IE设备的IP地址相同。 在“PLC设备”窗口设置CPU的IP地址,此处设置CPU的 IP地址为192.168.2.1,如图1所示。
注意:为Smart 1000 IE设置的IP地址必须不同于CPU的IP地址,二者不能重复。
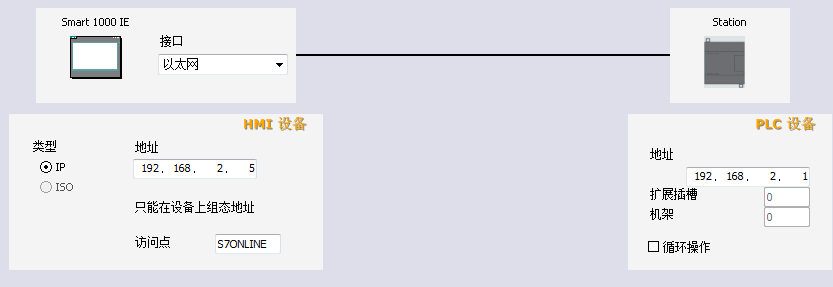
图1. 设置通信参数
连接参数设置完成之后还需设置Smart 1000 IE设备的IP地址。在触摸屏的“Transfer Settings”界面单击左下角的“Advanced”按钮,在“Ethernet Settings”对话框中输入Smart 1000 IE的IP地址192.168.2.5及子网掩码。输入完成后单击对话框右上角的“OK”按钮保存设置,如图2所示。
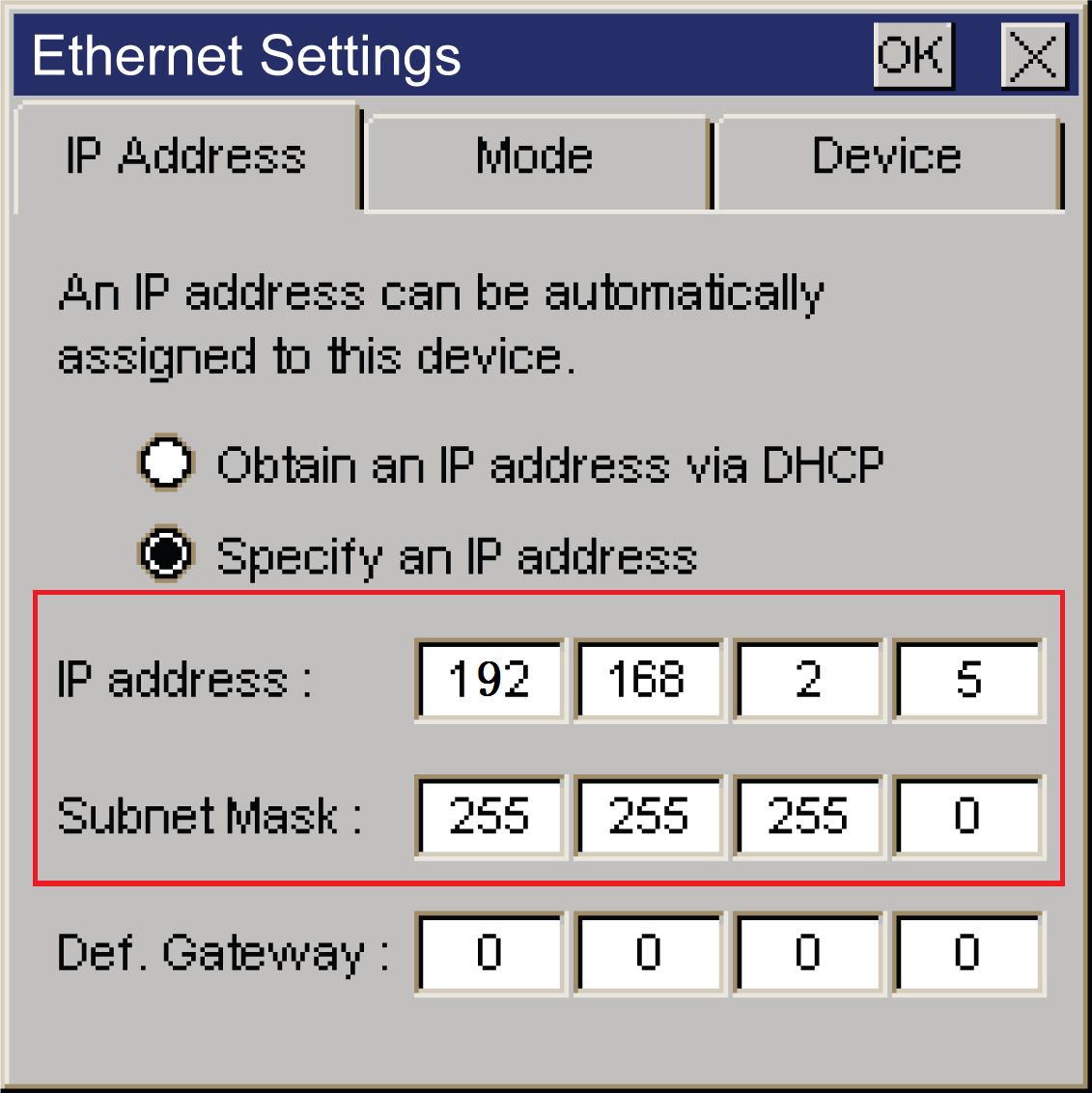
图2. Smart 1000 IE的IP地址
要将配置好的项目下载到Smart 1000 IE设备上,需要保证HMI设备的通信口处于激活状态,可通过HMI设备的“Control Panel”>“Transfer”进行设置。选择以太网方式下载项目时,需要勾选“Ethernet”右侧的“Enable Channel”,如图3所示。
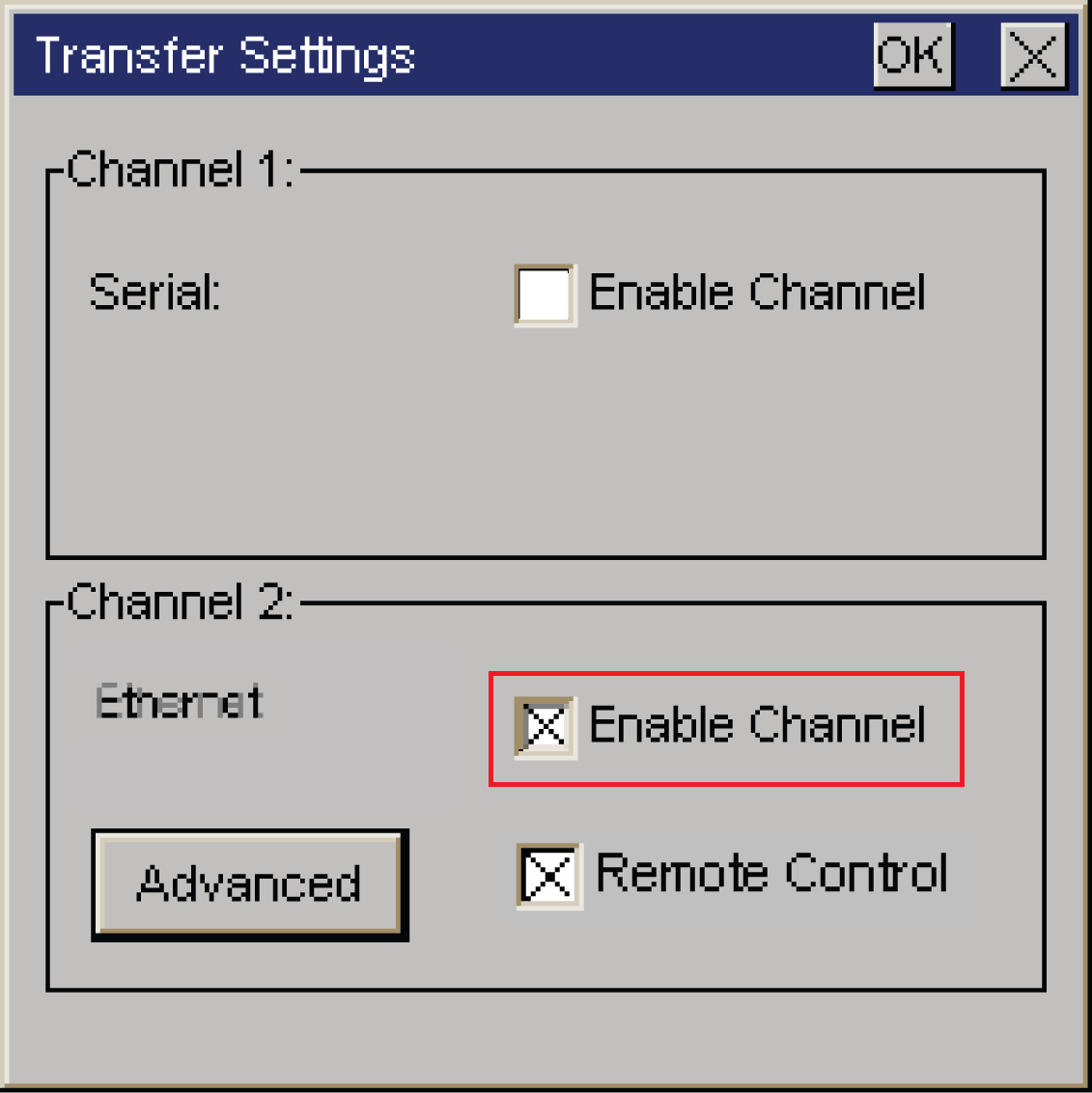
图3. 通信口使能
在WinCC flexible 软件的菜单栏选择“项目”>“传送”>“传输”,单击“传输”即可打开“选择设备进行传送”窗口,如图4所示。在“选择设备进行传送”窗口,选择传输模式为“以太网”,“计算机名或IP地址”处输入HMI设备的IP地址,参考上文在此设置IP地址为192.168.2.5。
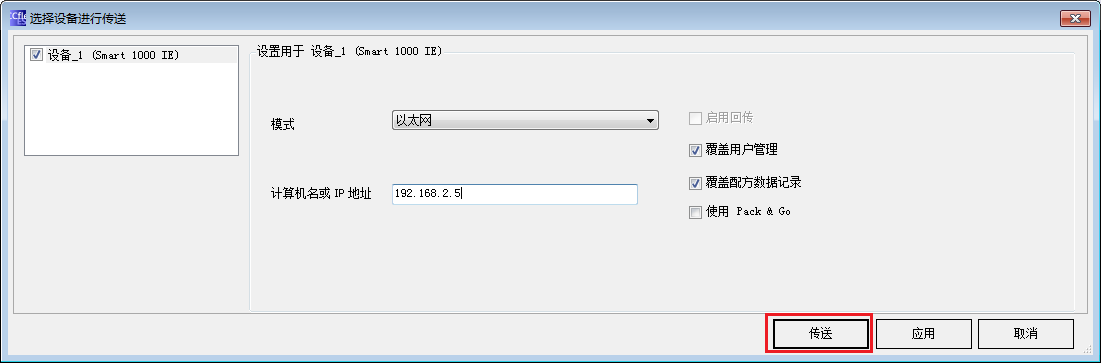
图4. 传输设置
IP地址设置完成后,点击图4中的“传送”按钮,待传送状态显示为“传输完成”时,至此已成功通过以太网模式将项目传送到HMI设备。
SINAMICS V90固件版本1.05以上开始,伺服驱动器提供了Modbus RTU 通信功能。PLC可以通过Modbus 的FC3及FC6功能代码读取或写入伺服驱动的寄存器,S7-200 Smart可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。本文详细描述了S-200 SMART PLC 通过Modbus RTU通信连接SINAMICS V90实现内部位置的MDI功能。
使用的硬件如表2-1所示。
|
序号 |
设备名称 |
订货号 |
|
1 |
SIMATIC S7-200 SMART CPU ST60 |
6ES7288-1ST60-0AA0 |
|
2 |
V90驱动器 |
6SL3210-5FE10-4UA0(V1.05版本以上) |
|
3 |
伺服电机 |
1FL6042-1AF61-0LG1 |
|
4 |
电机及编码器配套电缆 |
|
使用的软件如表2-2所示。
|
序号 |
描 述 |
|
1 |
Window 7 旗舰版 32位或64位 |
|
2 |
STEP 7-Micro/WIN SMART 编程软件 |
|
3 |
SINAMICS V-ASSISTANT V1.02 |
SINAMICS V90 伺服驱动通过 RS485 电缆与 PLC 连接,使用标准 Modbus 通信协议进行通讯。通过Modbus PLC给V90发送伺服使能和停止命令并且可以读取伺服驱动器的状态及故障代码。
SINAMICS V90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLC RS485(端口 0) 进行通讯,接线如图2-1所示。

图2-1 S7-200 SMART CPU 与V90通讯线连接
V90内部控制的控制数据寄存器如表3-1所示。
|
寄存器编号 |
描述 |
单位 |
定标系数 |
范围 |
|
40100 |
IPOS控制模式控制字 |
|
|
|
|
40932/40933 |
MDI 速度设定值 |
1000LU/min |
1 |
1至2147482647 |
|
40934 |
MDI 加速度倍率 |
% |
100 |
0.1 至100 |
|
40935 |
MDI 减速度倍率 |
% |
100 |
0.1 至100 |
|
40102 |
位置设定值高字 |
LU |
1 |
-2147482648至 2147482647 |
|
40103 |
位置设定值低字 |
表3-1 V90的内部位置控制数据寄存器
IPOS控制模式寄存器 40100控制字的定义如表3-2所示。
|
位 |
信号 |
描 述 |
|
0 |
SON_OFF1 |
通过上升沿使能伺服,=0时驱动通过斜坡函数发生器停车,脉冲被取消 |
|
1 |
OFF2 |
1:OFF2=1,允许使能 0:OFF2=0,立即取消脉冲 |
|
2 |
OFF3 |
1:OFF3=1,允许使能 0:OFF3=0,**停车,脉冲被消除 |
|
3 |
OPER |
1:允许运行(脉冲可以被使能) 0:禁止运行(取消脉冲) |
|
4 |
SETP_ACC |
触发上升沿来接收MDI 设定值 |
|
5 |
TRANS_TYPE SE |
1:立即接收新的设定值 0:通过触发上升沿来接收新的设定值 |
|
6 |
POS_TYP |
1:**定位 0:相对定位 |
|
7 |
RESET |
复位故障 |
|
8 |
预留 |
|
|
9 |
预留 |
|
|
10 |
PLC |
使能 PLC 的控制权 |
|
11 |
预留 |
|
|
12 |
预留 |
|
|
13 |
SREF |
启动回参考点(对于p29240=0,通过REF 信号回参考点) |
|
14 |
预留 |
|
|
15 |
预留 |
|
表3-2 寄存器 40100控制字的定义
按照表3-3设置伺服驱动器的相关参数
|
参数设置 |
说明 |
|
P29003=1 |
P29003为内部控制模式 |
|
P29303[0]=3 |
设置DI3为CWL,正限位,连接限位开关为高电平 |
|
P29304[0]=4 |
设置DI4为CCWL,负限位,连接限位开关为高电平 |
|
P29004=1 |
设置SINAMICS V90 的MODBUS站地址为1 |
|
P29007=2 |
设置通信协议为Modbus 协议 |
|
P29008=1 |
选择 Modbus 控制源,设定值和控制字来自于 Modbus PZD |
|
P29009=8 |
设置传输波特率为38400 波特 |
表3-3伺服驱动器的相关参数
PLC的编程如表3-4所示。
|
序号 |
|
|
1 |
初始化Modbus通信接口,需确保 PLC 的波特率与驱动设置一致,设置 PLC 校验方式为偶校验(parity = 2)。 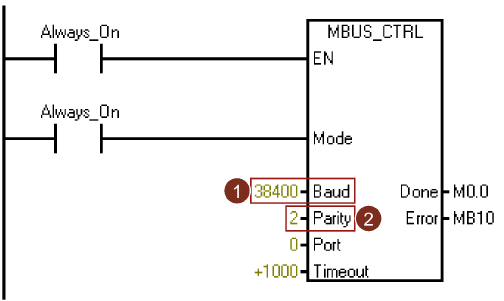 |
|
2 |
通过寄存器 40100 写入需要的控制字。必须设置寄存器 40100 的位 10 为 1 以允许 PLC 控制驱动。使能驱动器,先将16进制数 40E 写入寄存器 40100 中,然后再写入 40F)。  |
|
3 |
如果需要对带增量编码器驱动执行回参考点操作,保持驱动为伺服使能状态,可通过写控制字 40100 第13位,执行回参考点操作。 |
|
4 |
通过MBUS_MSG功能块,将位置设定值和速度设定值写入寄存器40932、40933、40934、40935、40102 和40103 中。  |
|
5 |
MDI相对定位的40100控制寄存器操作: (1) 在IPos 控制模式中,控制字的位6=0选择相对定位模式(40F) (2) 控制字的位5=0,设置使用上升沿来接收MDI 设定值(40F) (3) 将表3-1中的寄存器,写入需要的值 (如40934及40935写入十六进制的4000, 40932/40933写入MDI速度值,40102/40103写入MDI的位置值) 后,通过PLC发送控制字的位4上升沿来接收设定值,驱动进行MDI运行(41F) |
|
|
MDI**定位的40100控制寄存器操作: (1) 在IPos 控制模式中,控制字的位6=1来选择**定位模式(44F) (2) MDI设定值的生效有两种: MDI设定值立即生效:控制字的位5=1,设置接收的MDI设定值立即生效(46F); 上升沿来接收MDI 设定值:控制字的位5=0,设置使用上升沿来接收MDI 设定值(44F) (3) 将表3-1中的寄存器写入需要的值 (如40934及40935写入十六进制的4000,40932/40933写入MDI速度值,40102/40103写入MDI的位置值)后,如果是MDI设定值立即生效,则驱动进行MDI运行。如果是通过上升沿接收MDI设定值,则通过PLC发送控制字的位4的上升沿来接收设定值(45F),驱动进行MDI运行 |
表3-4 PLC的编程
用户通过以下步骤可创建以太网接口的西门子触摸屏与S7-200 SMART CPU的以太网通信,在此以设备Smart 1000 IE为例。
在WinCC flexible的主工作窗口中添加与CPU的连接与上文中RS485接口的西门子触摸屏类似,在此不再赘述。下面主要介绍连接参数设置及下载项目等。
设置连接参数,首先选择Smart 1000 IE的接口为“以太网”,即触摸屏的以太网接口。选中该接口后,该接口的参数设置窗口将在其下方自动显示。设置触摸屏的IP地址为192.168.2.5,该IP地址必须与Smart 1000 IE设备的IP地址相同。 在“PLC设备”窗口设置CPU的IP地址,此处设置CPU的 IP地址为192.168.2.1,如图1所示。
注意:为Smart 1000 IE设置的IP地址必须不同于CPU的IP地址,二者不能重复。
图1. 设置通信参数
连接参数设置完成之后还需设置Smart 1000 IE设备的IP地址。在触摸屏的“Transfer Settings”界面单击左下角的“Advanced”按钮,在“Ethernet Settings”对话框中输入Smart 1000 IE的IP地址192.168.2.5及子网掩码。输入完成后单击对话框右上角的“OK”按钮保存设置,如图2所示。
图2. Smart 1000 IE的IP地址
要将配置好的项目下载到Smart 1000 IE设备上,需要保证HMI设备的通信口处于激活状态,可通过HMI设备的“Control Panel”>“Transfer”进行设置。选择以太网方式下载项目时,需要勾选“Ethernet”右侧的“Enable Channel”,如图3所示。
图3. 通信口使能
在WinCC flexible 软件的菜单栏选择“项目”>“传送”>“传输”,单击“传输”即可打开“选择设备进行传送”窗口,如图4所示。在“选择设备进行传送”窗口,选择传输模式为“以太网”,“计算机名或IP地址”处输入HMI设备的IP地址,参考上文在此设置IP地址为192.168.2.5。
图4. 传输设置
IP地址设置完成后,点击图4中的“传送”按钮,待传送状态显示为“传输完成”时,至此已成功通过以太网模式将项目传送到HMI设备。
西门子6ES7288-2DT32-0AA0