
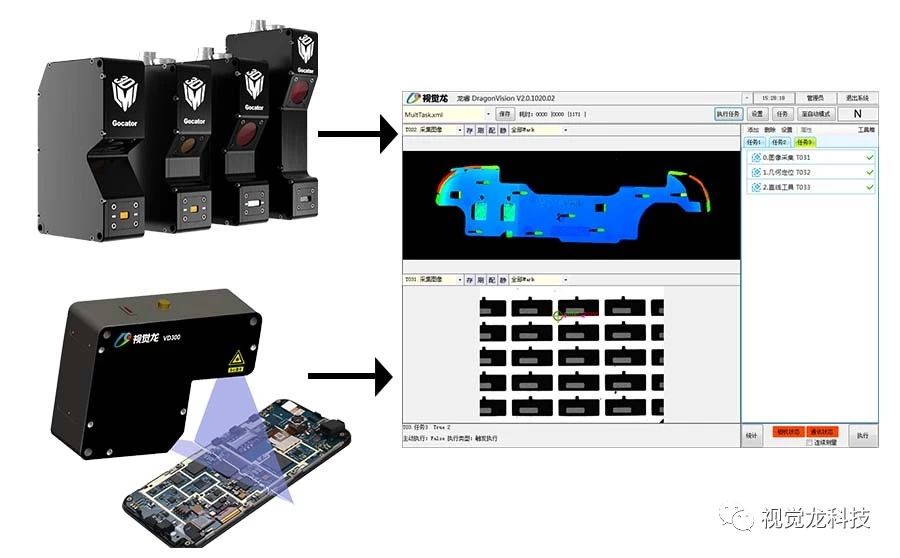
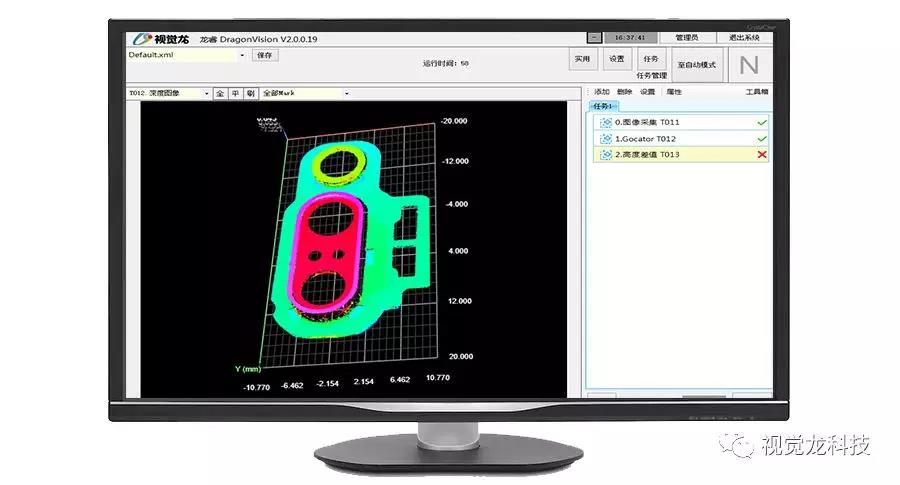
视觉龙自主研发的产品龙睿系列“DragonVision集成式智能相机”可应用在2D+3D+彩色等场景,可连接各品牌的三维传感器,通过高度差算法和平面度算法得出产品/工件的平面度、高度差值等。
平面度算法:依据设定的采样区域点3D信息,拟合出最小二乘平面,计算采样点到最小二乘平面的投影点,统计分析每个采样点与其投影点的差,最大差值-最小差值即平面度。
高度差算法:设定3个不在一条直线上的3个区域,拟合出基准平面,计算出被测平面到基准平面的投影,统计投影距离的均值,即得出 高度差。
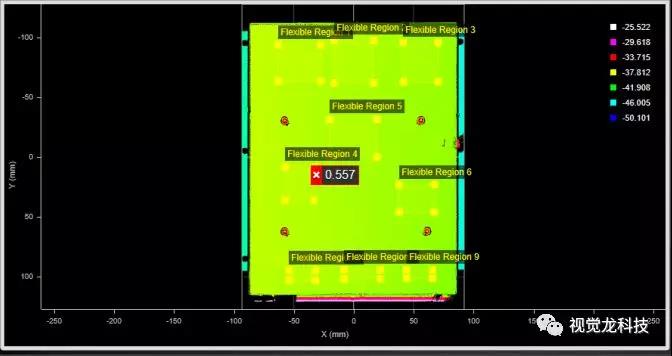
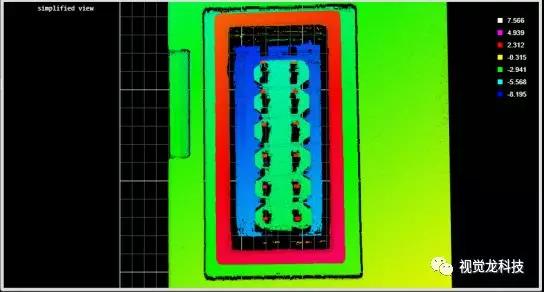
背光模组平面度测量:通过DragonVision软件轮廓追踪,稳定定位到各个需要检测的区域,通过高度测量工具实时测量各个检测区域的平均高度,使用平面度算法获取整块模组的平面度。Z轴方向精度:0.01mm。
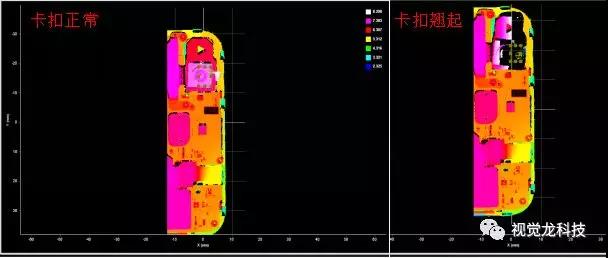
过DragonVision软件轮廓追踪,定位到摄像头卡扣检测的区域,通过高度测量工具实时测量卡扣的高度与体积,判断产品的高度差和位置偏移。
连接器元件的PIN脚高度检测:通过Dragonvision定位产品红色的矩形框,设置高度检测工具的ROI到检测PIN脚与边缘的高度差,若≥0.01mm, 则判定不合格。
联系我们:
深圳市视觉龙科技有限公司
地 址:中国.深圳市龙华区民清路光辉科技园2栋2单元6楼
电 话:0755-82721850/82545955/ 82545931
人事部:hr@visiondragon.com
市场部:marketing@visiondragon.com
销售部:gm@visiondragon.com
东莞视觉龙智能机器视觉技术有限公司
地址:中国.东莞市松山湖大学创新城B2栋309-311室
电话:0769—22892590(0-3)
邮箱:qujiang@visiondragon.com
苏州龙福天下智能科技有限公司
地址:中国.江苏省苏州市国际科技园二期A区402室
电话:0512-67210557
邮箱:lijianyi@visiondragon.com