

定位要求:
流程:运动平台抓取产品到达相机拍照点,VDSR通过以太网把产品的坐标值发送给外部设备,外部设备根据坐标值调整运动平台,把产品准确放到治具中。
精度:0.03mm
定位参数:
相机:130万
相机分辨率:1280*1024
视野:20mm*16mm
精度:20mm/1280pixel=0.0156mm/pixel<0.03mm 满足精度要求
相机标定:
通过两点标定,把图像畸变以及相机安装角度进行矫正,
相机由图像坐标系转换成世界坐标系。
定位模板制作:
提取产品的外轮廓作为模板
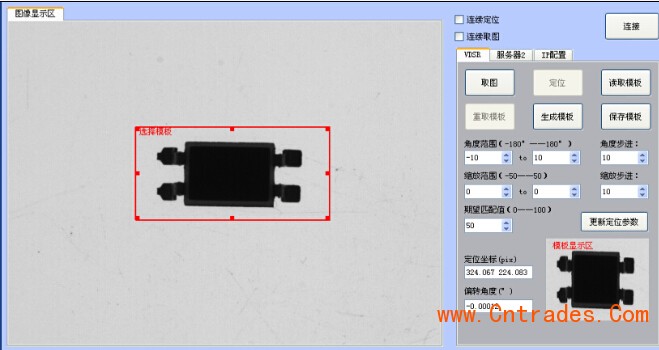
定位过程:
一:获取产品作模板时在相机坐标中的坐标值。
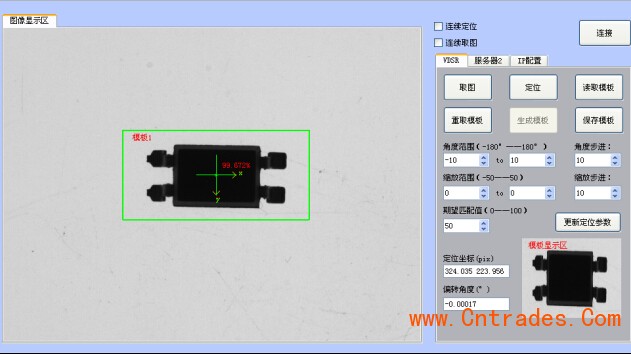
二:外部设备通过以太网发送指令触发VDSR拍照,然后VDSR通过以太网把当前产品在的角度值发送给外部设备,引导运动平台调整产品角度。
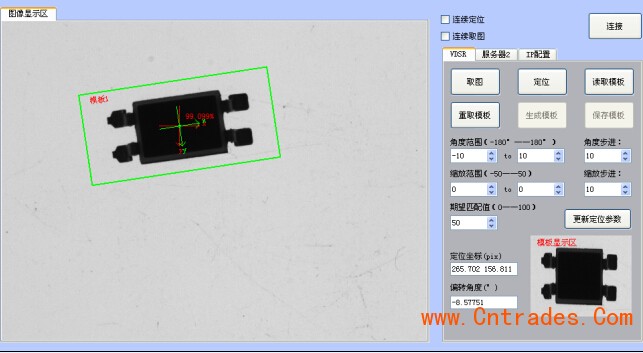
三:调整完产品角度后,外部设备通过以太网再发送指令触发VDSR拍照,VDSR通过以太网把当前产品在相机坐标中的坐标值发送给外部设备,外部设备计算出与模板位置的偏移量,引导运动平台运动