
西门子250KW变频器6SE64302UD425GA0 西门子250KW变频器6SE64302UD425GA0
微信15800846971
西门子**合作伙伴
详细信息
描述
引用是两个块之间的连接。
在LOGO!8中块连接器之间的连接组态和块参数之间的引用组态是标准化的。引用和组态现在就可以使用拖放来实现。本FAQ对比了LOGO!8设备和LOGO!0BA7设备之间组态引用的步骤。
组态LOGO!8需要安装LOGO!Soft Comfort 8.0或更高版本。
LOGO!8的LOGO!模块的步骤
- 在电路图中创建所需要的程序块。
- 使用拖放建立块连接器之间的连接。
- 单击每个程序块下的“display”(+)按钮来显示参数区。要创建引用的两个程序块都需要进行此操作。在每个块下面都会打开一个参数区,块参数会在表格中显示。“display”按钮只在可以使用或提供引用的块下显示。
-
在需要创建的引用块之间,将其中一个块输出连接的终端连接到另外一个块输入连接的终端。举例来说,可以用拖放来完成此操作。

图. 01
-
单击每个块下的“hide”(-)按钮来关闭参数区。

图. 02
注意
下面的工具可以用来编辑参数区(LOGO!8)
| 图标 | 功能 |
|
|
显示/隐藏所有块之间的引用线 |
|
|
显示所有块的参数区 |
|
|
隐藏所有块的参数区 |
到LOGO! 0BA7前的LOGO!模块的步骤
- 在电路图中创建需要的块。
- 使用拖放建立块的连接器之间的连接。
- 打开快的菜单,在里面通过双击块来组态引用。
-
在想要的参数上单击“引用”按钮。在下拉列表框中就会显示可以用来引用的块。单击想要的块来选定它。单击“OK”按钮来保存设置。

图. 03
块的引用和参数就会在电路中有绿色的显示。

图. 04
更多信息
关于“引用”的更详细的信息可以在LOGO!Soft Comfort(V1.7) 条目ID 24002694中还有LOGO!Soft Comfort online Help (V8.0)3.2.1.8部分, "Edit Parameter Field"章节,在条目ID 100782807中。
创建环境
本FAQ中的截图是在LOGO!Soft Comfort V8.0中创建的。
1 LOGO!App 简介
目前用户可以使用iTunes商店的应用软件LOGO!App连接和监控西门子LOGO!系列的PLC,软件名称如图1所示。在软件中成功组态LOGO! 设备的地址后,用户可以通过手机WIFI连接到LOGO!并可进行修改时钟和获取固件信息等操作。同时,用户可以监控输入/输出(以下简称I/O)状态,V存储区(以下简称VM)变量值和诊断信息,也可以添加监控的I/O和VM变量到趋势图查看一个概览图形。

图1应用程序名称
2 LOGO!App功能描述
2.1 接口配置
LOGO! App 支持IP地址和动态 DynDNS名称两种访问方式。 做法如下:
在图2中单击“Interface Configure”选项后进入图3界面单击 “By IP Address”选项,然后再单击 图标 ![]() ,进入图4设备添加界面。
,进入图4设备添加界面。

图2设置功能界面 图3设备访问方式界面
在图4中单击“Add”按钮,进入图5中进行设备名称和设备IP地址设置,此处我们设置设备名称为“MyLogo”,IP地址为“192.168.1.108”,**后单击“Save”按钮保存此配置,页面会自动转入到图6界面。

图4设备添加界面 图5设备添加界面
在图6中长按 ![]() 图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。
图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。

图6设备选择界面 图7设备选择界面
这时在图8中可以看到IP地址已经显示在界面中,然后点击“Save”图标,界面将自动转到图9。

图8设备访问方式界面
2.2 设置时钟
在图9中单击“Set Clock”选项将进入图10界面,在图10中可点击“Read”按钮查看LOGO!时间,也可点击“Current”按钮查看当前时间,之后进入图11界面。

图9设置功能界面 图10设备访问方式界面
在图11中LOGO!系统需要停机完成读取操作,单击“YES”图标进入图12,同样我们点击“Current”按钮来获取当前时间,然后通过“Set”按钮将当前屏幕中的时间更新到LOGO!中,此时进入图13界面。

图11获取LOGO!时钟界面 图12设备访问方式界面
在图13中点击“YES”按钮来完成更新后启动LOGO!的操作。

图13更新时钟界面
2.3 查看固件版本
在图14中单击“Show FW Version”选项后系统将返回LOGO!的固件版本如图15。

图14设置功能界面 图15固件版本界面
3 LOGO!App软件监控模式
3.1 I/O 状态监视器
在图16中选择“Monitor”图标,然后选择“I/O Status Monitor”选项后进入图17界面可观察到输入点的变化,在图17中用户选择需要监控的变量。可以通过点击“Edit”按钮进入图18中进行修改。

图16设置功能界面 图17 I/O监控界面
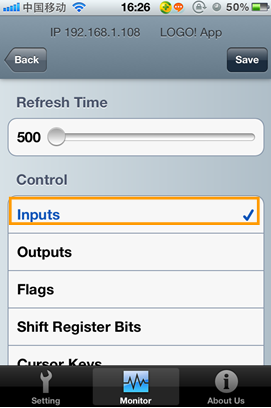
图18设置功能界面
3.2 VM列表监视器
在图19中单击“VM Table Monitor”选项进入图20的变量监控界面,点击“Add”按钮进入图21的变量添加界面。
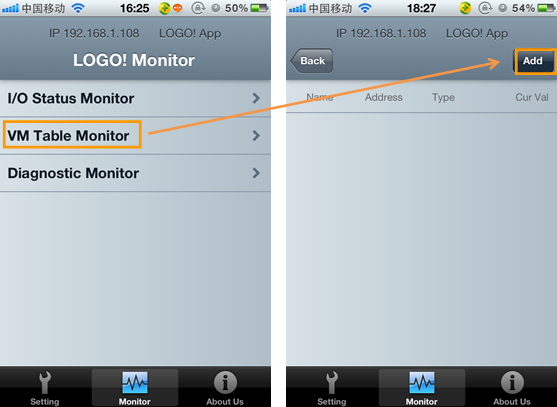
图19设置功能界面 图20 变量监控界面
在图21中填入变量名称、变量地址及变量数据类型后点击“Save”按钮,在变量监控界面图22中就可以监视或修改此变量的数值。

图21变量添加界面 图22 变量监控界面
此外,还可以用趋势图的方式来监控变量曲线。在图22中长按变量“speed”所在行,直至出现图23界面选择“Add To Chart”选项再返回图22界面,继续长按变量“speed”所在行,直至出现图24界面选择“Chart”选项,即进入图25的趋势图界面。

图23变量添加趋势图界面 图24 变量监控界面

图25趋势图界面
3.3 诊断监视器
在图26中单击“Diagnostic Monitor”选项后进入图27中可查看网络访问错误报警。

图26设置功能界面 图27 网络错误界面
如图28中选中“Network Access Error”标签后点击“Clear”按钮即可复位网络访问错误信息如图29所示。
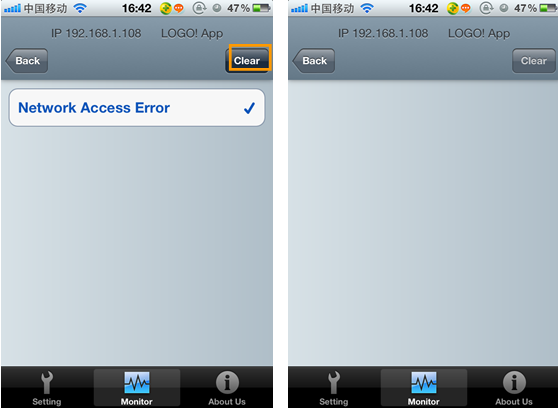
图28网络选择错误界面 图29 网络错误监控界面
6RA70 (三相桥B6C)
6RA7018-6DS22-0 3AC 400V 485V 30A 325V 5A
6RA7025-6DS22-0 60A 10A
6RA7028-6DS22-0 90A 10A
6RA7031-6DS22-0 125A 10A
6RA7075-6DS22-0 210A 15A
6RA7078-6DS22-0 280A 15A
6RA7081-6DS22-0 400A 25A
6RA7085-6DS22-0 600A 25A
6RA7087-6DS22-0 850A 30A
6RA7025-6GS22-0 3AC 575V 690V 60A 325V 5A
6RA7031-6GS22-0 125A 10A
6RA7075-6GS22-0 210A 15A
6RA7081-6GS22-0 400A 25A
6RA7085-6GS22-0 600A 25A
6RA7087-6GS22-0 800A 30A
6RA7086-6KS22-0 3AC 690V 900V 720A 30A.

1 ( a )是变压器反馈 LC 振荡电路。晶体管 VT 是共发射极放大器。变压器 T 的初级是起选频作用的 LC 谐振电路,变压器 T 的次级向放大器输入提供正反馈信号。接通电源时, LC 回路中出现微弱的瞬变电流,但是只有频率和回路谐振频率 f 0 相同的电流才能在回路两端产生较高的电压,这个电压通过变压器初次级 L1 、 L2 的耦合又送回到晶体管 V的基极。从图 1 ( b )看到,只要接法没有错误,这个反馈信号电压是和输入信号电压相位相同的,也就是说,它是正反馈。因此电路的振荡迅速加强并**后稳定下来。
变压器反馈 LC 振荡电路的特点是:频率范围宽、容易起振,但频率稳定度不高。它的振荡频率是: f 0 =1 / 2π LC。常用于产生几十千赫到几十兆赫的正弦波信号。
( 2 )电感三点式振荡电路


图 2 ( a )是另一种常用的电感三点式振荡电路。图中电感 L1 、 L2 和电容 C 组成起选频作用的谐振电路。从 L2 上取出反馈电压加到晶体管 VT 的基极。从图 2 ( b )看到,晶体管的输入电压和反馈电压是同相的,满足相位平衡条件的,因此电路能起振。由于晶体管的 3 个极是分别接在电感的 3 个点上的,因此被称为电感三点式振荡电路。
电感三点式振荡电路的特点是:频率范围宽、容易起振,但输出含有较多高次调波,波形较差。它的振荡频率是: f 0 =1/2π LC ,其中 L=L1 + L2 + 2M 。常用于产生几十兆赫以下的正弦波信号。
( 3 )电容三点式振荡电路


还有一种常用的振荡电路是电容三点式振荡电路,见图 3 ( a )。图中电感 L 和电容 C1 、 C2 组成起选频作用的谐振电路,从电容 C2 上取出反馈电压加到晶体管 VT 的基极。从图 3 ( b )看到,晶体管的输入电压和反馈电压同相,满足相位平衡条件,因此电路能起振。由于电路中晶体管的 3 个极分别接在电容 C1 、 C2 的 3 个点上,因此被称为电容三点式振荡电路。
电容三点式振荡电路的特点是:频率稳定度较高,输出波形好,频率可以高达 100 兆赫以上,但频率调节范围较小,因此适合于作固定频率的振荡器。它的振荡频率是: f 0 =1/2π LC ,其中 C= C 1 C 2 C 1 +C 2 。
上面 3 种振荡电路中的放大器都是用的共发射极电路。共发射极接法的振荡器增益较高,容易起振。也可以把振荡电路中的放大器接成共基极电路形式。共基极接法的振荡器振荡频率比较高,而且频率稳定性好。
RC 振荡器
RC 振荡器的选频网络是 RC 电路,它们的振荡频率比较低。常用的电路有两种。
( 1 ) RC 相移振荡电路


图 4 ( a )是 RC 相移振荡电路。电路中的 3 节 RC 网络同时起到选频和正反馈的作用。从图 4 ( b )的交流等效电路看到:因为是单级共发射极放大电路,晶体管 VT 的输出电压 U o 与输出电压 U i 在相位上是相差 180° 。当输出电压经过RC 网络后,变成反馈电压 U f 又送到输入端时,由于 RC 网络只对某个特定频率 f 0 的电压产生 180° 的相移,所以只有频率为 f 0 的信号电压才是正反馈而使电路起振。可见 RC 网络既是选频网络,又是正反馈电路的一部分。
RC 相移振荡电路的特点是:电路简单、经济,但稳定性不高,而且调节不方便。一般都用作固定频率振荡器和要求不太高的场合。它的振荡频率是:当 3 节 RC 网络的参数相同时: f 0 = 1 2π 6RC 。频率一般为几十千赫。
( 2 ) RC 桥式振荡电路


图 5 ( a )是一种常见的 RC 桥式振荡电路。图中左侧的 R1C1 和 R2C2 串并联电路就是它的选频网络。这个选频网络又是正反馈电路的一部分。这个选频网络对某个特定频率为 f 0 的信号电压没有相移(相移为 0° ),其它频率的电压都有大小不等的相移。由于放大器有 2 级,从 V2 输出端取出的反馈电压 U f 是和放大器输入电压同相的( 2 级相移 360°=0°)。因此反馈电压经选频网络送回到 VT1 的输入端时,只有某个特定频率为 f 0 的电压才能满足相位平衡条件而起振。可见 RC 串并联电路同时起到了选频和正反馈的作用。
实际上为了提高振荡器的工作质量,电路中还加有由 R t 和 R E1 组成的串联电压负反馈电路。其中 R t 是一个有负温度系数的热敏电阻, 它对电路能起到稳定振荡幅度和减小非线性失真的作用。从图 5 ( b )的等效电路看到,这个振荡电路是一个桥形电路。 R1C1 、 R2C2 、 R t 和 R E1 分别是电桥的 4 个臂,放大器的输入和输出分别接在电桥的两个对角线上,所以被称为 RC 桥式振荡电路。
RC 桥式振荡电路的性能比 RC 相移振荡电路好。它的稳定性高、非线性失真小,频率调节方便。它的振荡频率是:当R1=R2=R 、 C1=C2=C 时 f 0 = 1 2πRC 。它的频率范围从 1 赫~ 1 兆赫。
|
逻辑操作 |
|
|
ALD OLD |
电路块串联 电路块并联 |
|
LPS LRD LPP LDS |
入栈 读栈 出栈 装载堆栈 |
|
AENO |
对ENO进行与操作 |
|
ANDB IN1,OUT ANDW IN1,OUT ANDD IN1,OUT |
字节逻辑与 字逻辑与 双字逻辑与 |
|
ORB IN1,OUT ORW IN1,OUT ORD IN1,OUT |
字节逻辑或 字逻辑或 双字逻辑或 |
|
XORB IN1,OUT XORW IN1,OUT XORD IN1,OUT |
字节逻辑异或 字逻辑异或 双字逻辑异或 |
|
INVB OUT INVW OUT INVD OUT |
字节取反(1的补码) 字取反 双字取反 |
|
表、查找和转换指令 |
|
|
ATT TABLE,DATA |
把数据加到表中 |
|
LIFO TABLE,DATA FIFO TABLE,DATA |
从表中取数据,后入先出 从表中取数据,先入先出 |
|
FND= TBL,PATRN,INDX FND<> TBL,PATRN,INDX FND< TBL,PATRN,INDX FND> TBL,PATRN,INDX |
在表中查找符合比较条件的数据 |
|
BCDI OUT IBCD OUT |
BCD码转换成整数 整数转换成BCD码 |
|
BTI IN,OUT IBT IN,OUT ITD IN,OUT TDI IN,OUT |
字节转换成整数 整数转换成字节 整数转换成双整数 双整数转换成整数 |
|
DTR IN,OUT TRUNC IN,OUT ROUND IN,OUT |
双整数转换成实数 实数四舍五入为双整数 实数截位取整为双整数 |
|
ATH IN,OUT,LEN HTA IN,OUT,LEN ITA IN,OUT,FMT DTA IN,OUT,FMT RTA IN,OUT,FMT |
ASCII码→16进制数 16进制数→ASCII码 整数→ASCII码 双整数→ASCII码 实数→ASCII码 |
|
DECO IN,OUT ENCO IN,OUT |
译码 编码 |
|
SEG IN,OUT |
7段译码 |
|
中断指令 |
|
|
CRETI |
从中断程序有条件返回 |
|
ENI DISI |
允许中断 禁止中断 |
|
ATCH INT,EVENT DTCH EVENT |
给事件分配中断程序 解除中断事件 |
|
通信指令 |
|
|
XMT TABLE,PORT RCV TABLE,PORT |
自由端口发送 自由端口接收 |
|
NETR TABLE,PORT NETW TABLE,PORT |
网络读 网络写 |
|
GPA ADDR,PORT SPA ADDR,PORT |
获取端口地址 设置端口地址 |
|
高速计数器指令 |
|
|
HDEF HSC,MODE |
定义高速计数器模式 |
|
HSC N |
激活高速计数器 |
|
PLS X |
脉冲输出 |
|
数学、加1减1指令 |
|
|
+I IN1,OUT +D IN1,OUT +R IN1,OUT |
整数,双整数或实数法 IN1+OUT=OUT |
|
-I IN1,OUT -D IN1,OUT -R IN1,OUT |
整数,双整数或实数法 OUT-IN1 =OUT |
|
MUL IN1,OUT *R IN1,OUT *I IN1,OUT *D IN1,OUT |
整数乘整数得双整数 实数、整数或双整数乘法 IN1×OUT=OUT |
|
MUL IN1,OUT /R IN1,OUT /I IN1,OUT /D IN1,OUT |
整数除整数得双整数 实数、整数或双整数除法 OUT/IN1=OUT |
|
SQRT IN,OUT |
平方根 |
|
LN IN,OUT |
自然对数 |
|
LXP IN,OUT |
自然指数 |
|
SIN IN,OUT |
正弦 |
|
COS IN,OUT |
余弦 |
|
TAN IN,OUT |
正切 |
|
INCB OUT INCW OUT INCD OUT |
字节加1 字加1 双字加1 |
|
DECB OUT DECW OUT DECD OUT |
字节减1 字减1 双字减1 |
|
PID Table,Loop |
PID回路 |
|
定时器和计数器指令 |
|
|
TON Txxx,PT TOF Txxx,PT TONR Txxx,PT |
通电延时定时器 断电延时定时器 保持型通延时定时器 |
|
CTU Txxx,PV CTD Txxx,PV CTUD Txxx,PV |
加计数器 减计数器 加/减计数器 |
|
实时时钟指令 |
|
|
TODR T TODW T |
读实时时钟 写实时时钟 |
|
程序控制指令 |
|
|
END |
程序的条件结束 |
|
STOP |
切换到STOP模式 |
|
WDR |
看门狗复位(300 ms) |
|
JMP N LBL N |
跳到指定的标号 定义一个跳转的标号 |
|
CALL N(N1,…) CRET |
调用子程序,可以有16个可选参数 从子程序条件返回 |
|
FOR INDX,INIT,FINAL NEXT |
For/Next循环 |
|
LSCR N SCRT N SCRE |
顺控继电器段的启动 顺控继电器段的转换 顺控断电器段的结束 |
PLC死机的软件或硬件原因分析
可编程控制器PLC运行时可能会出现死机的情况,这给工业生产造成不可预估的损失,因此,首先要了解PLC死机的原因,针对原因进行排查,软件或硬件错误都有可能导致PLC死机,下面分别进行介绍:
1、硬件方面
(1)I/O窜电,PLC自动侦测到I/O错误,进入STOP模式。
(2)I/O损坏,程序运行到需要该I/O的反馈信号,不能向下执行指令。
(3)扩展模块(功能型,如A/D)线路干扰或开路等。
(4)电源部分有干扰或故障。
(5)PLC的连接模块及地址分配模块出故障。
(6)电缆引起的故障。
2、软件方面
(1)触发了死循环。
(2)程序改写了系统参数区的内容,却没有初始化部分。
(3)保护程序启动:硬件保护、限制使用时间(针对货款收回)
(4)数据溢出,步长过大、看门狗 (可修改DOG时间)动作。
一、问题提出
可编程控制器技术**主要是应用于自动化控制工程中,如何综合地运用前面学过知识点,根据实际工程要求合理组合成控制系统, 在此介绍组成可编程控制器控制系统的一般方法。
二、可编程控制器控制系统设计的基本步骤
1 .系统设计的主要内容
( 1 )拟定控制系统设计的技术条件。技术条件一般以设计任务书的形式来确定,它是整个设计的依据;
( 2 )选择电气传动形式和电动机、电磁阀等执行机构;
( 3 )选定 PLC 的型号;
( 4 )编制 PLC 的输入 / 输出分配表或绘制输入 / 输出端子接线图;
( 5 )根据系统设计的要求编写软件规格说明书,然后再用相应的编程语言(常用梯形图)进行程序设计;
( 6 )了解并遵循用户认知心理学,重视人机界面的设计,增强人与机器之间的友善关系;
( 7 )设计操作台、电气柜及非标准电器元部件;
( 8 )编写设计说明书和使用说明书;
根据具体任务,上述内容可适当调整。
2 . 系统设计的基本步骤
可编程控制器应用系统设计与调试的主要步骤,如图 1 所示。

S7-200系列PLC的基本硬件组成
S7-200系列PLC可提供4种不同的基本单元和6种型号的扩展单元。其系统构成包括基本单元、扩展单元、编程器、存储卡、写入器、文本显示器等。
1.基本单元
S7-200系列PLC中可提供4种不同的基本型号的8种CPU供选择使用,其输入输出点数的分配见表4-11:
表4-11 S7-200系列PLC中CPU22X的基本单元
|
型 号 |
输入点 |
输出点 |
可带扩展模块数 |
|
S7-200CPU221 |
6 |
4 |
— |
|
S7-200CPU222 |
8 |
6 |
2个扩展模块 78路数字量I/O点或10路模拟量I/O点 |
|
S7-200CPU224 |
14 |
10 |
7个扩展模块 168路数字量I/O点或35路模拟量I/O点 |
|
S7-200CPU226 |
24 |
16 |
2个扩展模块 248路数字量I/O点或35路模拟量I/O点 |
|
S7-200CPU226XM |
24 |
16 |
2个扩展模块 248路数字量I/O点或35路模拟量I/O点 |
2.扩展单元
S7-200系列PLC主要有6种扩展单元,它本身没有CPU,只能与基本单元相连接使用,用于扩展I/O点数,S7-200系列PLC扩展单元型号及输入输出点数的分配如表4-12所示。
表4-12 S7-200系列PLC扩展单元型号及输入输出点数
|
类 型 |
型 号 |
输入点 |
输出点 |
|
数字量扩展模块 |
EM221 |
8 |
无 |
|
EM222 |
无 |
8 |
|
|
EM223 |
4/8/16 |
4/8/16 |
|
|
模拟量扩展模块 |
EM231 |
3 |
无 |
|
EM232 |
无 |
2 |
|
|
EM235 |
3 |
1 |
3.编程器
PLC在正式运行时,不需要编程器。编程器主要用来进行用户程序的编制、存储和管理等,并将用户程序送入PLC中,在调试过程中,进行监控和故障检测。S7-200系列PLC可采用多种编程器,一般可分为简易型和智能型。
简易型编程器是袖珍型的,简单实用,价格低廉,是一种很好的现场编程及监测工具,但显示功能较差,只能用指令表方式输入,使用不够方便。智能型编程器采用计算机进行编程操作,将专用的编程软件装入计算机内,可直接采用梯形图语言编程,实现在线监测,非常直观,且功能强大,S7-200系列PLC的专用编程软件为STEP7-Micro/WIN。
4.程序存储卡
为了保证程序及重要参数的安全,一般小型PLC设有外接EEPROM卡盒接口,通过该接口可以将卡盒的内容写入PLC,也可将PLC内的程序及重要参数传到外接EEPROM卡盒内作为备份。程序存储卡EEPROM有6ES 7291-8GC00-0xA0和6ES 7291-8GD00-0xA0两种,程序容量分别为8K和16K程序步。
5.写入器
写入器的功能是实现PLC和EPROM之间的程序传送,是将PLC中RAM区的程序通过写入器固化到程序存储卡中,或将PLC中程序存储卡中的程序通过写入器传送到RAM区。
6.文本显示器
文本显示器TD200不仅是一个用于显示系统信息的显示设备,还可以作为控制单元对某个量的数值进行修改,或直接设置输入/输出量。文本信息的显示用选择/确认的方法,**多可显示80条信息,每条信息**多4个变量的状态。过程参数可在显示器上显示,并可以随时修改。TD200面板上的8个可编程序的功能键,每个都分配了一个存储器位,这些功能键在启动和测试系统时,可以进行参数设置和诊断。
西门子PLC S7-200 主控触点指令(MC、MCR
主控触点通常解决这样一类问题:编程时如果每个线圈控制都串入同样触点,将适用很多存储单元,使程序运行速度下降。用主控指令能优化这类电路结构。
使用注意事项:

(1) MC起点,M为嵌套层数(0~7层);MC与MCR必须成对使用。
(2) MCR/MC只使用于Y或 M(不包括特M)。
取反,定操作,结束指令(INV NOP END)
(1) 取反

(2) 定操作指令NOP
1) 程序可加入NOP 可改动或追加程序。
2) 若序中加将其它指令换成NOP指令,电路将有较大变化,有可能电路出错。
(3) 程序结束指令END
1) END用于程序终了。
2) 若程序中插入END指令,则END以后的指令步状就不再执行。
PLC输入/输出滞后时间(PLC系统响应时间)
输入/输出滞后时间又称系统响应时间,是指PLC部输入信号发生变化的时刻至它控制的有关外部输出信号发生变化的时刻之间的时间间隔,它由输入电路滤波时间、输出电路的滞后时间和因扫描工作方式产生的滞后时间这三部分组成。
输入模块的RC滤波电路用来滤除由输入端引入的干扰噪声,消除因外接输入触点动作时产生的抖动引起的不良影响,滤波电路的时间常数决定了输入滤波时间的长短,其典型值为10ms左右。
输出模块的滞后时间与模块的类型有关,继电器型输出电路的滞后时间一般在10ms左右;双向晶闸管型输出电路在负载通电时的滞后时间约为1ms,负载由通电到断电时的**滞后时间为10ms;晶体管型输出电路的滞后时间一般在1ms以下。
由扫描工作方式引起的滞后时间**长可达两个多扫描周期。
PLC总的响应延迟时间一般只有几十ms,对于一般的系统是无关紧要的。要求输入输出信号之间的滞后时间尽量短的系统,可以选用扫描速度快的PLC或采取其他措施。
整体式PLC又叫做单元式或箱体式PLC,CPU模块、I/O模块和电源装在一个箱状机壳内,结构非常紧凑。它的体积小、价格低,小型PLC一般采用整体式结构。图1是三菱公司的FX1S系列PLC。
整体式PLC提供多种不同I/O点数的基本单元和扩展单元供用户选用,基本单元内有CPU模块、I/O模块和电源,扩展单元内只有I/O模块和电源,基本单元和扩展单元之间用扁平电缆连接。各单元的输入点与输出点的比例一般是固定的,有的PLC有全输入型和全输出型的扩展单元。选择不同的基本单元和扩展单元,可以满足用户的不同要求。

图1 整体式PLC
整体式PLC一般配备有许多专用的特殊功能单元,如模拟量I/O单元、位置控制单元和通信单元等,使PLC的功能得到扩展。
FX系列的基本单元、扩展单元和扩展模块的高度和深度相同,但是宽度不同。它们不用基板,各模块可用底部自带的卡子卡在DIN导轨上,两个相邻的单元或模块之间用扁平电缆连接,安装好后组成一个整齐的长方体。
S7-200 CPU 22X 的输入/输出接口
S7-200主机配置的输入接口是数字信号输入接口。为了提高抗干扰能力,输入接口均有光电隔离电路,即由发光二极管和光电三极管组成的光电耦合器。
S7-200主机配置的输出接口通常是继电器和晶体管输出型。继电器输出型为有触点输出,外加负载电源既可以是交流,也可以是直流。CPU 226 AC/DC/继电器输出的CPU外围接线图如图所示。
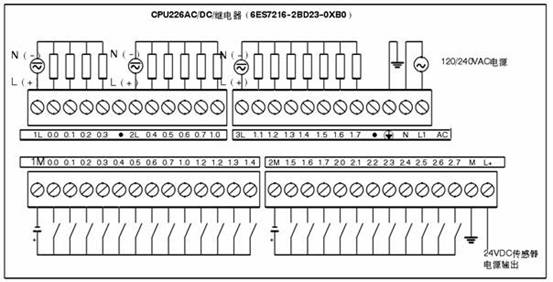
CPU 226 AC/DC/继电器输出的CPU外围接线图
7-200系列PLC数字量I/O扩展模块
|
类型 |
型号 |
输入点数/类型 |
输出点数/类型 |
|
输入扩展模块 |
EM 221 |
8输入/24VDC光电隔离 |
|
|
EM 221 |
8输入/120/230VAC |
||
|
输出扩展模块 |
EM 222 |
|
8输出/24 VDC晶体管型 |
|
EM 222 |
8输出/继电器型 |
||
|
EM 222 |
8输出/120/230VAC晶闸管型 |
||
|
输入/输出 |
EM 223 |
4输入/24VDC光电隔离 |
4输出/24VDC晶体管型 |
|
EM 223 |
4输入/24VDC光电隔离 |
4输出/继电器型、 |
|
|
EM 223 |
8输入/24VDC光电隔离 |
8输出/24VDC晶体管型 |
|
|
EM 223 |
8输入/24VDC光电隔离 |
8输出/继电器型 |
|
|
EM 223 |
16输入/24VDC光电隔离 |
16输出/24VDC晶体管型 |
|
|
EM 223 |
16输/2入4VDC光电隔离 |
16输出/继电器型 |