
西门子75千瓦变频器6SE6430-2AD37-5FA0 西门子75千瓦变频器6SE6430-2AD37-5FA0
微信15800846971
西门子**合作伙伴
详细信息
描述
引用是两个块之间的连接。
在LOGO!8中块连接器之间的连接组态和块参数之间的引用组态是标准化的。引用和组态现在就可以使用拖放来实现。本FAQ对比了LOGO!8设备和LOGO!0BA7设备之间组态引用的步骤。
组态LOGO!8需要安装LOGO!Soft Comfort 8.0或更高版本。
LOGO!8的LOGO!模块的步骤
- 在电路图中创建所需要的程序块。
- 使用拖放建立块连接器之间的连接。
- 单击每个程序块下的“display”(+)按钮来显示参数区。要创建引用的两个程序块都需要进行此操作。在每个块下面都会打开一个参数区,块参数会在表格中显示。“display”按钮只在可以使用或提供引用的块下显示。
-
在需要创建的引用块之间,将其中一个块输出连接的终端连接到另外一个块输入连接的终端。举例来说,可以用拖放来完成此操作。

图. 01
-
单击每个块下的“hide”(-)按钮来关闭参数区。

图. 02
注意
下面的工具可以用来编辑参数区(LOGO!8)
| 图标 | 功能 |
|
|
显示/隐藏所有块之间的引用线 |
|
|
显示所有块的参数区 |
|
|
隐藏所有块的参数区 |
到LOGO! 0BA7前的LOGO!模块的步骤
- 在电路图中创建需要的块。
- 使用拖放建立块的连接器之间的连接。
- 打开快的菜单,在里面通过双击块来组态引用。
-
在想要的参数上单击“引用”按钮。在下拉列表框中就会显示可以用来引用的块。单击想要的块来选定它。单击“OK”按钮来保存设置。

图. 03
块的引用和参数就会在电路中有绿色的显示。

图. 04
更多信息
关于“引用”的更详细的信息可以在LOGO!Soft Comfort(V1.7) 条目ID 24002694中还有LOGO!Soft Comfort online Help (V8.0)3.2.1.8部分, "Edit Parameter Field"章节,在条目ID 100782807中。
创建环境
本FAQ中的截图是在LOGO!Soft Comfort V8.0中创建的。
1 LOGO!App 简介
目前用户可以使用iTunes商店的应用软件LOGO!App连接和监控西门子LOGO!系列的PLC,软件名称如图1所示。在软件中成功组态LOGO! 设备的地址后,用户可以通过手机WIFI连接到LOGO!并可进行修改时钟和获取固件信息等操作。同时,用户可以监控输入/输出(以下简称I/O)状态,V存储区(以下简称VM)变量值和诊断信息,也可以添加监控的I/O和VM变量到趋势图查看一个概览图形。

图1应用程序名称
2 LOGO!App功能描述
2.1 接口配置
LOGO! App 支持IP地址和动态 DynDNS名称两种访问方式。 做法如下:
在图2中单击“Interface Configure”选项后进入图3界面单击 “By IP Address”选项,然后再单击 图标 ![]() ,进入图4设备添加界面。
,进入图4设备添加界面。

图2设置功能界面 图3设备访问方式界面
在图4中单击“Add”按钮,进入图5中进行设备名称和设备IP地址设置,此处我们设置设备名称为“MyLogo”,IP地址为“192.168.1.108”,**后单击“Save”按钮保存此配置,页面会自动转入到图6界面。

图4设备添加界面 图5设备添加界面
在图6中长按 ![]() 图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。
图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。

图6设备选择界面 图7设备选择界面
这时在图8中可以看到IP地址已经显示在界面中,然后点击“Save”图标,界面将自动转到图9。

图8设备访问方式界面
2.2 设置时钟
在图9中单击“Set Clock”选项将进入图10界面,在图10中可点击“Read”按钮查看LOGO!时间,也可点击“Current”按钮查看当前时间,之后进入图11界面。

图9设置功能界面 图10设备访问方式界面
在图11中LOGO!系统需要停机完成读取操作,单击“YES”图标进入图12,同样我们点击“Current”按钮来获取当前时间,然后通过“Set”按钮将当前屏幕中的时间更新到LOGO!中,此时进入图13界面。

图11获取LOGO!时钟界面 图12设备访问方式界面
在图13中点击“YES”按钮来完成更新后启动LOGO!的操作。

图13更新时钟界面
2.3 查看固件版本
在图14中单击“Show FW Version”选项后系统将返回LOGO!的固件版本如图15。

图14设置功能界面 图15固件版本界面
3 LOGO!App软件监控模式
3.1 I/O 状态监视器
在图16中选择“Monitor”图标,然后选择“I/O Status Monitor”选项后进入图17界面可观察到输入点的变化,在图17中用户选择需要监控的变量。可以通过点击“Edit”按钮进入图18中进行修改。

图16设置功能界面 图17 I/O监控界面
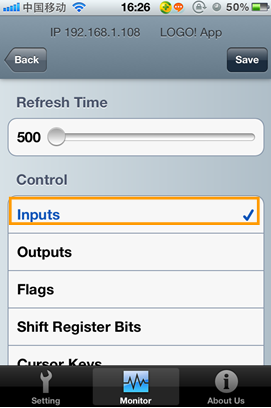
图18设置功能界面
3.2 VM列表监视器
在图19中单击“VM Table Monitor”选项进入图20的变量监控界面,点击“Add”按钮进入图21的变量添加界面。
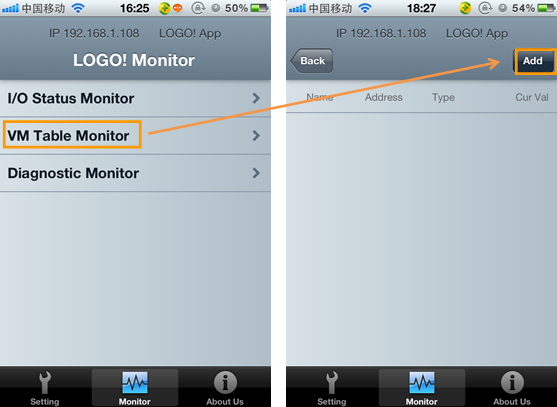
图19设置功能界面 图20 变量监控界面
在图21中填入变量名称、变量地址及变量数据类型后点击“Save”按钮,在变量监控界面图22中就可以监视或修改此变量的数值。

图21变量添加界面 图22 变量监控界面
此外,还可以用趋势图的方式来监控变量曲线。在图22中长按变量“speed”所在行,直至出现图23界面选择“Add To Chart”选项再返回图22界面,继续长按变量“speed”所在行,直至出现图24界面选择“Chart”选项,即进入图25的趋势图界面。

图23变量添加趋势图界面 图24 变量监控界面

图25趋势图界面
3.3 诊断监视器
在图26中单击“Diagnostic Monitor”选项后进入图27中可查看网络访问错误报警。

图26设置功能界面 图27 网络错误界面
如图28中选中“Network Access Error”标签后点击“Clear”按钮即可复位网络访问错误信息如图29所示。
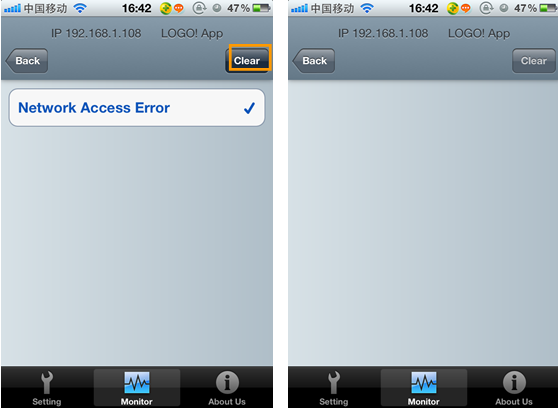
图28网络选择错误界面 图29 网络错误监控界面
6RA70 (三相桥B6C)
6RA7018-6DS22-0 3AC 400V 485V 30A 325V 5A
6RA7025-6DS22-0 60A 10A
6RA7028-6DS22-0 90A 10A
6RA7031-6DS22-0 125A 10A
6RA7075-6DS22-0 210A 15A
6RA7078-6DS22-0 280A 15A
6RA7081-6DS22-0 400A 25A
6RA7085-6DS22-0 600A 25A
6RA7087-6DS22-0 850A 30A
6RA7025-6GS22-0 3AC 575V 690V 60A 325V 5A
6RA7031-6GS22-0 125A 10A
6RA7075-6GS22-0 210A 15A
6RA7081-6GS22-0 400A 25A
6RA7085-6GS22-0 600A 25A
6RA7087-6GS22-0 800A 30A
6RA7086-6KS22-0 3AC 690V 900V 720A 30A.

可编程控制器的工作过程及FN2N PLC的组成
PLC虽具有微机的许多特点,但它的工作方式却与微机有很大的不同。微机一般采用等待命令的工作方式,如常见的键盘扫描方式或I/O扫描方式,有键按下或I/O动作则转入相应的子程序无键按下则继续扫描。PLC则采用循环扫描工作方式,在PLC中,用户程序按先后顺序存放,如:
1 ![]() × × × ×
× × × ×
2 × × × ×
![]()
3 × × × ×
10 × × × ×
11 ED
CPU从**条指令开始执行程序,直至遇到结束符后又返回**条。如此周而复始不断循环。这种工作方式是在系统软件控制下,顺次扫描各输入点的状态,按用户程序进行运算处理,然后顺序向输出点发出相应的控制信号。整个工作过程可分为五个阶段:自诊断,与编程器等的通信,输入采样,用户程序执行,输出刷新,其工作过程框图如图所示:

PLC工作过程框图
1)每次扫描用户程序之前,都先执行故障自诊断程序。自诊断内容为I/O部分、存储器、CPU等,发现异常停机显示出错。若自诊断正常,继续向下扫描。
2)PLC检查是否有与编程器和计算机的通信请求,若有则进行相应处理,如接收由编程器送来的程序、命令和各种数据,并把要显示的状态、数据、出错信息等发送给编程器进行显示。如果有与计算机等的通信请求,也在这段时间完成数据的接受和发送任务。
3)PLC的中央处理器对各个输入端进行扫描,将输人端的状态送到输入状态寄存器中,这就是输入采样阶段。
4)中央处理器CPU将指令逐条调出并执行,以对输人和原输出状态(这些状态统称为数据)进行“处理”,即按程序对数据进行逻辑、算术运算,再将正确的结果送到输出状态寄存器中,这就是程序执行阶段。
5)当所有的指令执行完毕时,集中把输出状态寄存器的状态通过输出部件转换成被控设备所能接受的电压或电流信号,以驱动被控设备,这就是输出刷新阶段。
PLC经过这五个阶段的工作过程,称为一个扫描周期。完成一个周期后,又重新执行上述过程,扫描周而复始地进行。扫描周期是PLC的重要指标之一,在不考虑第二个因素(与编程器等通信)时,扫描周期T为:
T=(读入一点时间×输入点数)+(运算速度×程序步数)+(输出一点时间×输出点数)十故障诊断时间
显然扫描时间主要取决于程序的长短,一般每秒钟可扫描数十次以上,这对于工业设备通常没有什么影响。但对控制时间要求较严格,响应速度要求快的系统,就应该**的计算响应时间,细心编排程序,合理安排指令的顺序,以尽可能减少扫描周期造成的响应延时等不良影响。
PLC与继电接触器控制的重要区别之一就是工作方式不同。继电接触器控制是按“并行”方式工作的,也就是说是按同时执行的方式工作的,只要形成电流通路,就可能有几个继电器同时动作。而PLC是以反复扫描的式工作的,它是循环地连续逐条执行程序,任一时刻它只能执行一条指令,这就是说PLC是以“串行”方式工作的。这种串行工作方式可以避免继电接触器控制的触点竞争和时序失配问题。
总之,采用循环扫描的工作方式也是PLC区别于微机的**特点,使用者应特别注意。
FN2N PLC 的规格及组成
FN2N系列PLC有FN2N16、FN2N32、FN2N48、FN2N64、FN2N80 、FN2N128等, FN2N 32,主要由以下几个部分构成:
1、控制单元:设有与编程器,计算机的接口,与I/O扩展单元相连的扩展口,输入、输出端子、电源输入和输出端子,FN2N有16个输入点和16个输出点。
2、扩展单元。
3、智能单元。
4、链接单元。
5、编程工具:使用MELSOFT GX Developer编程软件。
定子串电阻减压起动控制电路工作过程
1.电动机在起动时在三相定子电路中串接电阻,使电动机定子绕组的电压降低,待起动结束后将电阻短接,电动机在额定电压下正常运行。这种起动方式不受电动机接线形式的影响,设备简单,因而在中小型生产机械设备中应用较广。
但起动电阻一般采用板式电阻或铸铁电阻,电阻功率大,能通过较大电流,但能量损耗较大。

2.工作过程:
合上QS,按下SB2,KM1线圈得电,KM1主触点闭合,电动机M串电阻减压起动,KM1辅助常开触点闭合,实现自锁,KT线圈得电。
a图KT延时时间到,KT常开触点闭合,KM2线圈得电并自锁,KM2主触点闭合,电动机M全压运转。
b图KT延时时间到,KT常开触点闭合,KM2线圈得电并自锁,KM2主触点闭合,电动机M全压运转。KM2辅助常闭触点断开,KM1、KT线圈失电,
按下SB1,KM2线圈断电,KM2主触点、辅助触点断开,电动机M停止。
用S7-200控制可双向运转的三相感应电动机
可逆电动机起动器电路一一适用于改变三相交流感应电动机旋转方向
这个示例程序用于控制可双向运转的三相感应电动机。
当与输入点I0.0相连的左转点动开关(Le)闭合时,电动机逆时针方向旋转,当与输入点I0.1相连的右转点动开关(Ri)闭合时,电动机顺时针方向旋转。但这要有一个前题,即与输入点I0.3相连的电动机电路断路器和与输入点I0.2相连的停机开关(OFF)都没有动作。只有按下停机开关,并等待5秒钟之后,才可以改变电动机的旋转方向。这样做是为了让电动机有足够的时问刹车停转,然后再反向起动,如果需要电动机反转的话。如
果与I0.0和I0.1相连的点动开关同时按下,电动机停转,并且小起动。

程序框图

程序和注释
在程序起始部分,程序检查是否必须激活互锁电路。互锁电路防比电动机误起动,或者按错误方向起动。只有当所有点动开关都没有动作(位于起始状态)或者等待时问溢出时,互锁才清除,即M2.0被置成逻辑0.
如果电动机断路器(输入点10.3)没有动作,停机点动开关(输入点10.2)也没有动作(这两个触点都是常闭触点);并且状态位M1门没有被设置成顺时针旋转标志,则使能位M 2.1被置为逻辑1。电动机才有可能逆时针旋转。代表逆时针旋转的状态位是M1.0。用类似方法可得到顺时针方向旋转的起动条件。
当点动起动开关(1e和Ri)这一动作,并且互锁位和状态位都没有被设置成相反的旋转方向时,电动止起动。即相关的输出位和状态位被置位,状态位的作用是使输出能够自保。电动止逆时针方向旋转起动器由输出点Q0.0控制。电动机顺时针方向旋转起动器由输出点Q0.1控制。
除此外,另有一组信号灯指示电动机当前的运行状态;逆时针方向旋转指示灯(Le)与输出点00.4相连;顺时针方向旋转指示灯(Ri)与输出点00.3相连;关电机指示灯(OFF)与输出点00.2相连。
当电动机被停机时,"ED”的下降沿将辅助存储位M 2.3置为1,进入停机模式。当M 2.3被置位时,限制电动机再次起动的定时器开始计时,该定时器的预置时问是5秒(500 X10ms),经过5秒钟后,内部存储器位M 2.3被复位。在这段强制等待时问内与输出点Q0.5相连的信号灯(Wait)闪烁。如果状态位都没有被置位,则点亮与输出点00.2相连的停止状态指示灯(OFF)。
该程序的长度为61个字。


S7-200 PLC高速计数器指令的使用简介
(1)每个高速计数器都有一个32位当前值和一个32位预置值,当前值和预设值均为带符号的整数值。要设置高速计数器的新当前值和新预置值,必须设置控制字节(表6-7),令其第五位和第六位为1,允许更新预置值和当前值,新当前值和新预置值写入特殊内部标志位存储区。然后执行HSC指令,将新数值传输到高速计数器。当前值和预置值占用的特殊内部标志位存储区如表1所示。
表1 HSC0-HSC5当前值和预置值占用的特殊内部标志位存储区
|
要装入的数值 |
HSC0 |
HSC1 |
HSC2 |
HSC3 |
HSC4 |
HSC5 |
|
新的当前值 |
SMD38 |
SMD48 |
SMD58 |
SMD138 |
SMD148 |
SMD158 |
|
新的预置值 |
SMD42 |
SMD52 |
SMD62 |
SMD142 |
SMD152 |
SMD162 |
除控制字节以及新预设值和当前值保持字节外,还可以使用数据类型HC(高速计数器当前值)加计数器号码(0、1、2、3、4或5)读取每台高速计数器的当前值。因此,读取操作可直接读取当前值,但只有用上述HSC指令才能执行写入操作。
(2)执行HDEF指令之前,必须将高速计数器控制字节的位设置成需要的状态,否则将采用默认设置。默认设置为:复位和起动输入高电平有效,正交计数速率选择4×模式。执行HDEF指令后,就不能再改变计数器的设置,除非CPU进入停止模式。
(3)执行HSC指令时,CPU检查控制字节和有关的当前值和预置值。
可编程控制器的工作方式和工作过程
(1)PLC的工作方式:采用循环扫描方式。在PLC处于运行状态时,从内部处理、通信操作、程序输入、程序执行、程序输出,一直循环扫描工作。
注意:
由于PLC是扫描工作过程,在程序执行阶段即使输入发生了变化,输入状态映象寄存器的内容也不会变化,要等到下一周期的输入处理阶段才能改变。循环扫描过程如下:

(2) 工作过程:主要分为内部处理、通信操作、输入处理、程序执行、输出处理几个阶段。
1) 内部处理阶段:
在此阶段,PLC检查CPU模块的硬件是否正常,复位监视定时器,以及完成一些其它内部工作。
2) 通信服务阶段
在此阶段,PLC与一些智能模块通信、响应编程器键入的命令,更新编程器的显示内容等,当PLC处于停状态时,只进行内容处理和通信操作等内容。
3) 输入处理
输入处理也叫输入采样。在此阶段顺序读入所有输入端子的通断状态,并将读入的信息存入内存中所对应的映象寄存器。在此输入映象寄存器被刷新,接着进入程序的执行阶段。
4) 程序执行
根据PLC梯形图程序扫描原则,按先左后右,先上后下的步序,逐句扫描,执行程序。但遇到程序跳转指令,则根据跳转条件是否满足来决定程序的跳转地址。若用户程序涉及到输入输出状态时,PLC从输入映象寄存器中读出上一阶段采入的对应输入端子状态,从输出映象寄存器读出对应映象寄存器的当前状态。根据用户程序进行逻辑运算,运算结果再存入有关器件寄存器中。
5) 输出处理
程序执行完毕后,将输出映象寄存器,即元件映象寄存器中的Y寄存器的状态,在输出处理阶段转存到输出锁存器,通过隔离电路,驱动功率放大电路,使输出端子向外界输出控制信号,驱动外部负载。
(3)PLC的运行方式:
1) 运行工作模式
当处于运行工作模式时,PLC要进行从内部处理、通信服务、输入处理、程序处理、输出处理,然后按上述过程循环扫描工作。
在运行模式下,PLC通过反复执行反映控制要求的用户程序来实现控制功能,为了使PLC的输出及时地响应随时可能变化的输入信号,用户程序不是只执行一次,而是不断地重复执行,直至PLC停机或切换到STOP工作模式。
注:PLC的这种周而复始的循环工作方式称为扫描工作方式。
2) 停止模式
当处于停止工作模式时,PLC只进行内部处理和通信服务等内容。
液体混合装置控制的模拟
一、 实验目的
熟练使用置位和复位等各条基本指令,通过对工程实例的模拟,熟练地掌握PLC的编程和程序调试。
二、液体混合装置控制的模拟实验面板图:图6-9-1所示

液体混合装置控制面板
上图下框中的V1、V2、V3、M分别接主机的输出点Q0.0、Q0.1、Q0.2、Q0.3;起、停按钮SB1、SB2分别接主机的输入点I0.0、I0.1;液面传感器SL1、SL2、SL3分别接主机的输入点I0.2、I0.3、I0.4。上图中,液面传感器利用钮子开关来模拟,启动、停止用动合按钮来实现,液体A阀门、液体B阀门、混合液阀门的打开与关闭以及搅动电机的运行与停转用发光二极管的点亮与熄灭来模拟。
三、控制要求
由实验面板图可知:本装置为两种液体混合装置,SL1、SL2、SL3为液面传感器,液体A、B阀门与混合液阀门由电磁阀YV1、YV2、YV3控制,M为搅动电机,控制要求如下:
初始状态:装置投入运行时,液体A、B阀门关闭,混合液阀门打开20秒将容器放空后关闭。
启动操作:按下启动按钮SB1,装置就开始按下列约定的规律操作:
液体A阀门打开,液体A流入容器。当液面到达SL2时,SL2接通,关闭液体A阀门,打开液体B阀门。液面到达SL1时,关闭液体B阀门,搅动电机开始搅动。搅动电机工作6秒后停止搅动,混合液体阀门打开,开始放出混合液体。当液面下降到SL3时,SL3由接通变为断开,再过2秒后,容器放空,混合液阀门关闭,开始下一周期。
停止操作:按下停止按钮SB2后,在当前的混合液操作处理完毕后,才停止操作(停在初始状态上)。
四、编制梯形图并写出程序
参考程序 表6-9-1所示
|
步序 |
指 令 |
步序 |
指 令 |
|
0 |
LD I0.0 |
17 |
LD M10.0 |
|
1 |
EU |
18 |
S M20.0, 1 |
|
2 |
= M10.0 启动脉冲 |
19 |
LD M20.0 |
|
3 |
LD I0.1 |
20 |
A T38 |
|
4 |
EU |
21 |
O M10.0 |
|
5 |
= M10.1 停止脉冲 |
22 |
S Q0.0, 1 液体A阀打开 |
|
6 |
LD I0.2 |
23 |
LD M10.3 |
|
7 |
EU |
24 |
S Q0.1, 1 液体B阀打开 |
|
8 |
= M10.2 |
25 |
LD M10.3 |
|
9 |
LD I0.3 |
26 |
O M10.1 |
|
10 |
EU |
27 |
R Q0.0, 1 液体A阀关闭 |
|
11 |
= M10.3 |
28 |
LD M10.2 |
|
12 |
LDN I0.4 |
29 |
S Q0.3, 1 搅动电机工作 |
|
13 |
AN M11.1 |
30 |
LD M10.2 |
|
14 |
= M11.0 |
31 |
O M10.1 |
|
15 |
LDN I0.4 |
32 |
R Q0.1, 1 液体B阀关闭 |
|
16 |
= M11.1 |
33 |
LD T37 |
|
步序 |
指 令 |
步序 |
指 令 |
|
34 |
O M10.1 |
46 |
= M11.5 |
|
35 |
R Q0.3, 1 |
47 |
LD M11.4 |
|
36 |
LD Q0.3 |
48 |
S Q0.2, 1 混合液阀打开 |
|
37 |
TON T37, +60 延时6S |
49 |
LD T38 |
|
38 |
LDN Q0.3 |
50 |
O M10.1 |
|
39 |
= M12.0 |
51 |
R Q0.2, 1 混合液阀关闭 |
|
40 |
LDN Q0.3 |
52 |
LD M11.2 |
|
41 |
A M12.0 |
53 |
S M20.1, 1 |
|
42 |
AN M11.5 |
54 |
LD T38 |
|
43 |
= M11.4 |
55 |
R M20.1, 1 |
|
44 |
LDN Q0.3 |
56 |
LD M20.1 |
|
45 |
A M12.0 |
57 |
TON T38, +20 延时2S |
五、程序设计及工作过程分析
启动操作:按下启动按钮SB1,I0.0的动合触点闭合,M10.0产生启动脉冲,M10.0的动合触点闭合,使Q0.0保持接通,液体A电磁阀YV1打开,液体A流入容器。当液面上升到SL3时,虽然I0.4动合触点接通,但没有引起输出动作。当液面上升到SL2位置时,SL2接通,I0.3的动合触点接通,M10.3产生脉冲,M10.3的动合触点接通一个扫描周期,复位指令R Q0.0使Q0.0线圈断开,YV1电磁阀关闭,液体A停止流入;与此同时,M10.3的动合触点接通一个扫描周期,保持操作指令S Q0.1使Q0.1线圈接通,液体B电磁阀YV2打开,液体B流入。
当液面上升到SL1时,SL1接通,M10.2产生脉冲,M10.2动合触点闭合,使Q0.1线圈断开,YV2关闭,液体B停止注入,M10.2动合触点闭合,Q0.3线圈接通,搅匀电机工作,开始搅动。搅动电机工作时,Q0.3的动合触点闭合,启动定时器T37,过了6秒,T37动合触点闭合,Q0.3线圈断开,电机停止搅动。当搅匀电机由接通变为断开时,使M11.2产生一个扫描周期的脉冲,M11.2的动合触点闭合,Q0.2线圈接通,混合液电磁阀YV3打开,开始放混合液。
液面下降到SL3,液面传感器SL3由接通变为断开,使M11.0动合触点接通一个扫描周期,M20.1线圈接通,T1开始工作,2秒后混合液流完,T1动合触点闭合,Q0.2线圈断开,电磁阀YV3关闭。同时T1的动合触点闭合,Q0.0线圈接通,YV1打开,液体A流入,开始下一循环。
停止操作:按下停止按钮SB2,I0.1的动合触点接通,M10.1产生停止脉冲,使M20.0线圈复位断开,M20.0动合触点断开,在当前的混合操作处理完毕后,使Q0.0不能再接通,即停止操作。
参考梯形图如下所示:

图6-9-2
六、实验设备
1、THSMS-A型、THSMS-B型实验装置或THSMS-1型、THSMS-2型实验箱一台
2、安装了STEP7-Micro/WIN32编程软件的计算机一台
3、PC/PPI编程电缆一根
4、锁紧导线若干
四出口体育馆人数动态统计及显示PLC控制系统设计
体育馆人数需要动态显示,该馆有四个入口(B1-B4)和四个出口(B5-B8),并用一个清零按钮清零,用四位十进制LED显示。
|
|
序 号 |
PLC地址 |
电气符号 |
状 态 |
符号说明 |
工作原理 |
|
|
|
1 |
00000 |
S1 |
NO |
按钮 |
清零 |
|
|
|
2 |
00001 |
B1 |
NO |
传感器 |
东门入口 |
|
|
|
3 |
00002 |
B2 |
NO |
传感器 |
东门出口 |
|
|
|
4 |
00003 |
B3 |
NC |
传感器 |
南门入口 |
|
|
|
5 |
00004 |
B4 |
NO |
传感器 |
南门出口 |
|
|
|
6 |
00005 |
B5 |
NO |
传感器 |
西门入口 |
|
|
|
7 |
00006 |
B6 |
NO |
传感器 |
西门出口 |
|
|
|
8 |
00007 |
B7 |
NC |
传感器 |
北门入口 |
|
|
|
9 |
00008 |
B8 |
NO |
传感器 |
北门出口 |
|
|
|
10 |
0500 |
A1 |
|
BCD |
个位 |
|
|
|
11 |
0501 |
A2 |
|
BCD |
个位 |
|
|
|
12 |
0502 |
A3 |
|
BCD |
个位 |
|
|
|
13 |
0503 |
A4 |
|
BCD |
个位 |
|
|
|
14 |
0504 |
B1 |
|
BCD |
十位 |
|
|
|
15 |
0505 |
B2 |
|
BCD |
十位 |
|
|
|
16 |
0506 |
B3 |
|
BCD |
十位 |
|
|
|
17 |
0507 |
B4 |
|
BCD |
十位 |
|
|
|
18 |
0508 |
C1 |
|
BCD |
百位 |
|
|
|
19 |
0509 |
C2 |
|
BCD |
百位 |
|
|
|
20 |
0510 |
C3 |
|
BCD |
百位 |
|
|
|
21 |
0511 |
C4 |
|
BCD |
百位 |
|
|
|
22 |
0512 |
D1 |
|
BCD |
千位 |
|
|
|
23 |
0513 |
D2 |
|
BCD |
千位 |
|
|
|
24 |
0514 |
D3 |
|
BCD |
千位 |
|
|
|
25 |
0515 |
D4 |
|
BCD |
千位 |
|




