
西门子6SE64402UD311CA1 西门子6SE64402UD311CA1
高价回收西门子PLC模块工程余货 高价回收西门子PLC模块工程余货
西门子中国回收中心 回收西门子DO模块 回收西门子DI模块 回收西门子AO模块 回收西门子AI模块,西门子扩展模块
回收西门子全新系列产品,回收西门子模块,回收西门子触摸屏,西门子伺服系统,回收西门子电缆。



=================================== =========
SIEMENS 上海隆彦智能科技有限公司
联系人 :李 建( 销售经理)
24小时服务热线 :15800846971
公司传真( Tel ):021-67355123
工作QQ:3192212451
全新原装,质量保证,保修一年,提供技术服务,价格合理!
============================================
上海隆彦长期销售西门子PLC200.300.400.S1200.S1500.ET200.Smart200,6SE70变频器.70备件.6SY7000/7010.C98面板,6RA70/28/24直流调速器,6XV电缆,6EP电源,3RW30/40/44软启动器,6AV人机触摸屏,LOGO!,6SL系列G110.G120.S120.V10.V20,MM440/430/420变频,6DR阀门定位器,7ML.7ME.7MF.7MH仪表仪器,6FC.6SN伺服数控,电机等西门子系列产品
《销售态度》:质量保证、诚信服务、及时到位!
《销售宗旨》:为客户创造价值是我们**追求的目标!
《服务说明》:现货配送至全国各地含税(17%)含运费!
《产品质量》:原装**,全新原装!
《产品优势》:专业销售 薄利多销 信誉好,口碑好,价格低,货期短,大量现货,服务周到!
Overview
1FK7电机为永磁激励同步电机,结构极为紧凑。 现有的各种选件、变速箱和编码器、加上扩大了的产品范围意味着 1FK7 电机能够较为理想地适合于任何用途。 因此它们同样能满足日益增长的、采用**技术的机器的要求。
1FK7电机与SINAMICS S120 驱动系统共同使用,就可形成功能强大的高性能系统。 根据应用用于速度和位置控制的集成编码器系统可以分为:
这种电机被设计为工作时无需外冷,由电机表面进行散热。 1FK7电机具有高的过载能力。

1FK7电机与SINAMICS S120 驱动系统共同使用,就可形成功能强大的高性能系统。 根据应用用于速度和位置控制的集成编码器系统可以分为:
这种电机被设计为工作时无需外冷,由电机表面进行散热。 1FK7电机具有高的过载能力。

1FK7 紧凑型电机的优点:
-
因极高功率密度而实现节省空间安装
-
可用于普遍应用
-
电机系列范围宽
- 因极高功率密度而实现节省空间安装
- 可用于普遍应用
- 电机系列范围宽
1FK7高动态电机可实现:
-
由于转子的惯性矩小,因而具有极高的动态响应能力
- 由于转子的惯性矩小,因而具有极高的动态响应能力
1FK7 高动态性能型电机提供:
-
可靠的闭环控制属性,适用于高或可变负载转动惯量
-
补偿干扰所需的优化和调试费用**少
- 可靠的闭环控制属性,适用于高或可变负载转动惯量
- 补偿干扰所需的优化和调试费用**少
Area of application
-
机床
-
机械手和搬运系统
-
木材、玻璃制品、陶瓷和石材加工
-
包装、塑料和纺织机械
-
辅助轴
西门子6SE64402UD311CA1

I/O分配

3.邮件分拣控制梯形图

图2 邮件分拣控制梯形图

图2 (续)

图2 (续)
4、邮件分拣控制语句表

西门子PLC的两种网络连接器介绍
利用西门子提供的两种网络连接器可以把多个设备很容易的连到网络中。两种连接器都有两组螺钉端子,可以连接网络的输入和输出。一种连接器仅提供连接到CPU的接口,而另一种连接器增加了一个编程接口。两种网络连接器还有网络偏置和终端偏置的选择开关,该开关在ON位置时的内部接线图,在OFF位置时未接终端电阻。接在网络端部的连接器上的开关应放在ON位置。如下图所示:

图1网络连接器
带有编程器接口的连接器可以把SIMATIC编程器或操作员面板接到网络中,而不用改动现有的网络连接。编程器接口的连接器把CPU来的信号传到编程器接口。
在其通讯模式中还有自由端口通讯、工业以太网通讯、调制解调器通讯、无线以太网通讯,
PLC顺序控制设计法中的步与动作概念举例介绍
1. 步
顺序控制设计法**基本的思想是将系统的一个工作周期的划分为若干个顺序相连的阶段,这些阶段称为步(Step),可以用编程元件,(例如辅助继电器M和顺序控制继电器S)来代表各步。步是根据输出量的状态变化来划分的,在任何一步之内,各输出量的ON/OFF状态不变,但是相邻两步输出量总的状态是不同的,步的这种划分方法使代表各步的编程元件的状态与各输出量的状态是之间有着极为简单的逻辑关系。

送料小车开始停在左测限们开关X2处(见图17),按下起动按钮X0,X2变为ON,打开贮料斗的闸门,开始装料,同时用定时器T0定时,10s后关闭贮料斗的闸门,Y0变为ON,开始右行,碰到限位开关X1后停下来卸料(Y3为ON),同时用定时器T1定时;5s后Y1变为ON,开始左行,碰到限位开关X2后返回初始状态,停止运行。

根据Y0~Y3的ON/OFF状态的变化,显然一个工作周期可以分为装料,右行、卸料和左行这4步,另外还应设置等待起动的初始步,分别用M0~M4来代表这5步,图17左上部是小车运动的空间示意图,左下部是是有关编程元件的波形图(时序图),右边是描述该系统的顺序功能图,图中用矩形方框表示步,方框中可以用数字表示该步的编号,一般用代表该步的编程元件的元件的元件号作为步的编号,如M0等,这样在根据顺序功能图设计梯形图较为方便。
2. 初始步
与系统的初始状态相对应的步称为初始步,初始状态一般是系统等待起动命令的相对静止的状态。初始步用双线方框表示,每一个顺序功能图至少应该有一个初始步。
3. 活动步
当系统正处于某一步所在的阶段时,该步处于活动状态,称该步为“活动步”。步处于活动状态时,相应的动作被执行:处于不活动状态时,相应的非存储型动作被停止执行。
4. 与步对应的动作或命令
可以将一个控制系统划分为被控系统和施控系统,例如在数控车床系统中,数控装置是施控系统,而车床是被控系统。对于被控系统,在某一步中要完成某些“动作”(action);对于施控系统,在某一步中则要向被控系统发出某些“命令”(command)。为了叙述方便,
下面将命令或动作统称为动作,并用矩形框中的文字或符号表示,该矩形框应与相应的符号相连。
如果某一步有几个动作,可以用图18中的两种画法来表示,但是并不隐含这些动作之间的任何顺序。说明命令的语句应清楚地表明该命令是存储型的还是非存储型的。例如某步的存储型命令“打开1号阀并保持”,是指该步为活动步时打开,该步为不活动时继续打开;非存储型命令“打开1号阀”,是指该步为活动步时打开,为不活动步时关闭。
除了以上的基本结构之外,使用动作的修饰词(见表1)可以在一步中完成不同的动作。修饰词允许在不增加逻辑的情况下控制动作。例如,可以使用修饰词L来限制配料阀打开的时间。
表1 动作的修饰词
N
非存储型
当步变为不活动步时动作终止
S
置位(存储)
当步变为不活动步时动作继续,直到动作被复位
R
复位
被修饰词S,SD,SL,或DS起动的动作被终止
L
时间限制
步变为活动步时动作被起动,直到步变为不活动步或设定时间到
D
时间延迟
步变为活动步时延迟定时器被起动,如果延迟之后步仍然是活动的,动作被起动和继续,直到步变不活动步
P
脉冲
当步变为活动步,动作被起动并且只执行一次
SD
存储与时间延迟
在时间延迟之后动作被起动,一直到动作被复位
DS
延迟与存储
在延迟之后如果步仍然是活动的,动作被起动直到被复位
SL
存储与时间限制
步变为活动步时动作被起动,一直到设定的时间到或动作被复位
在图17中,定时器T0的线圈应在M1为活动步时“通电”,M1为不活动步时断电,从这个意义上来说,T0的线圈相当于步M1的一个动作,所以将T0作为步M1的动作来处理。步M1下面的转换条件T0由在指定时时间到时闭合的T0的常开触点提供。因此动作框中的T0对应的是T0的线圈,转换条件T0对应的是T0的常开触点。
一个声控开关控制的照明灯控制程序的梯形图举例
试设计一个照明灯的控制程序。当接在I0.0上的声控开关感应到声音信号后,接在Q0.0上的照明灯可发光30S。如果在这段时间内声控开关又感应到声音信号,则时间间隔从头开始。这样可确保**后一次感应到声音信号后,灯光可维持30S的照明。
答案:参考梯形图
![)X[NOJDZC)2O3YFO]FTJ%%K](http://www.plc100.com/prog/tixingtu/shengkongdeng.files/image001.jpg)
1)周期可调的脉冲信号发生器
如图5-6所示采用定时器T0产生一个周期可调节的连续脉冲。当X0常开触点闭合后,**次扫描到T0常闭触点时,它是闭合的,于是T0线圈得电,经过1s的延时,T0常闭触点断开。T0常闭触点断开后的下一个扫描周期中,当扫描到T0常闭触点时,因它已断开,使T0线圈失电,T0常闭触点又随之恢复闭合。这样,在下一个扫描周期扫描到T0常闭触点时,又使T0线圈得电,重复以上动作,T0的常开触点连续闭合、断开,就产生了脉宽为一个扫描周期、脉冲周期为1s的连续脉冲。改变T0的设定值,就可改变脉冲周期。
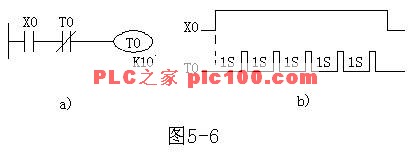
图5-6 周期可调的脉冲信号发生器
a)梯形图 b)时序图
(2)占空比可调的脉冲信号发生器
如图5-7所示为采用两个定时器产生连续脉冲信号,脉冲周期为5秒,占空比为3:2(接通时间:断开时间)。接通时间3s,由定时器T1设定,断开时间为2s,由定时器T0设定,用Y0作为连续脉冲输出端。
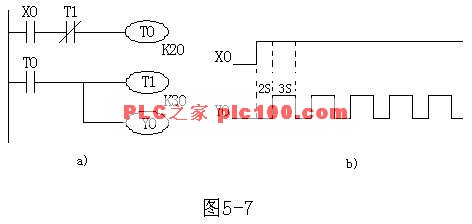
图5-7 占空比可调的脉冲信号发生器
a)梯形图 b)时序图
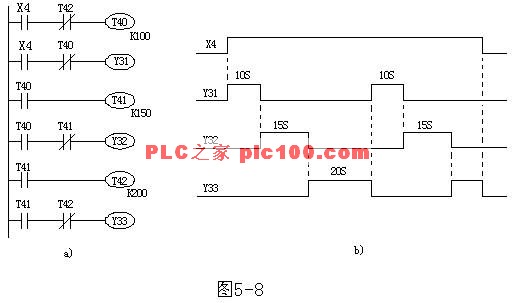
(3)顺序脉冲发生器
如图5-8a所示为用三个定时器产生一组顺序脉冲的梯形图程序,顺序脉冲波形如图5-8b所示。当X4接通,T40开始延时,同时Y31通电,定时l0s时间到,T40常闭触点断开,Y31断电。T40常开触点闭合,T41开始延时,同时Y32通电,当T41定时15s时间到,Y32断电。T41常开触点闭合,T42开始延时.同时Y33通电,T42定时20s时间到,Y33断电。如果X4仍接通,重新开始产生顺序脉冲,直至X4断开。当X4断开时,所有的定时器全部断电,定时器触点复位,输出Y31、Y32及Y33全部断电。
PLC输入模块简介
是FXlN系列的直流输入电路和内部电路的示意图。PLC外部的虚线框内是NPN管集电极开路输出的电子传感器(如接近开关)的示意图。图2-4是扩展模块FX2N?48ER?UAl/UL的交流输入电路的示意图。


当图2-3中的外接触点接通或图中的NPN型晶体管饱和导通时,电流经24V电源的正极(24V端子)、S/S端子、内部电路、X0等输入端子和外部的触点或晶体管,从0V端子流回24V电源的负极,使光耦合器中两个反芳联的发光二极管中的一个亮,光敏三极管饱和导通,CPU在输入阶段读入的是数字1;外接触点断开或.NPN晶体管处于截止状态时,光耦合器中的发光二极管熄灭,光敏三极管截止,CPU在输入阶段读入的是数字0。
当图2-4中的外接触点接通,或图中的PNP型晶体管饱和导通时,电流经24V电源的正极(24V端子)、外部的触点或晶体管、X0等输入端子、内部电路和S/S端子,从0V端子流回24V电源的负极,使光耦合器中的发光二极管亮,光敏三极管饱和导通。
输入电路中设有RC滤波电路,以防止由于输入触点抖动或外部干扰脉冲引起错误的输入信号。滤波电路延迟时间的典型值为10~20ms(信号上升沿)和20~50ms(信号下降沿),输入电流约5~10mA.
- 机床
- 机械手和搬运系统
- 木材、玻璃制品、陶瓷和石材加工
- 包装、塑料和纺织机械
- 辅助轴
西门子6SE64402UD311CA1
I/O分配
3.邮件分拣控制梯形图
图2 邮件分拣控制梯形图
图2 (续)
图2 (续)
4、邮件分拣控制语句表
西门子PLC的两种网络连接器介绍
利用西门子提供的两种网络连接器可以把多个设备很容易的连到网络中。两种连接器都有两组螺钉端子,可以连接网络的输入和输出。一种连接器仅提供连接到CPU的接口,而另一种连接器增加了一个编程接口。两种网络连接器还有网络偏置和终端偏置的选择开关,该开关在ON位置时的内部接线图,在OFF位置时未接终端电阻。接在网络端部的连接器上的开关应放在ON位置。如下图所示:
图1网络连接器
带有编程器接口的连接器可以把SIMATIC编程器或操作员面板接到网络中,而不用改动现有的网络连接。编程器接口的连接器把CPU来的信号传到编程器接口。
在其通讯模式中还有自由端口通讯、工业以太网通讯、调制解调器通讯、无线以太网通讯,
PLC顺序控制设计法中的步与动作概念举例介绍
1. 步
顺序控制设计法**基本的思想是将系统的一个工作周期的划分为若干个顺序相连的阶段,这些阶段称为步(Step),可以用编程元件,(例如辅助继电器M和顺序控制继电器S)来代表各步。步是根据输出量的状态变化来划分的,在任何一步之内,各输出量的ON/OFF状态不变,但是相邻两步输出量总的状态是不同的,步的这种划分方法使代表各步的编程元件的状态与各输出量的状态是之间有着极为简单的逻辑关系。
送料小车开始停在左测限们开关X2处(见图17),按下起动按钮X0,X2变为ON,打开贮料斗的闸门,开始装料,同时用定时器T0定时,10s后关闭贮料斗的闸门,Y0变为ON,开始右行,碰到限位开关X1后停下来卸料(Y3为ON),同时用定时器T1定时;5s后Y1变为ON,开始左行,碰到限位开关X2后返回初始状态,停止运行。
根据Y0~Y3的ON/OFF状态的变化,显然一个工作周期可以分为装料,右行、卸料和左行这4步,另外还应设置等待起动的初始步,分别用M0~M4来代表这5步,图17左上部是小车运动的空间示意图,左下部是是有关编程元件的波形图(时序图),右边是描述该系统的顺序功能图,图中用矩形方框表示步,方框中可以用数字表示该步的编号,一般用代表该步的编程元件的元件的元件号作为步的编号,如M0等,这样在根据顺序功能图设计梯形图较为方便。
2. 初始步
与系统的初始状态相对应的步称为初始步,初始状态一般是系统等待起动命令的相对静止的状态。初始步用双线方框表示,每一个顺序功能图至少应该有一个初始步。
3. 活动步
当系统正处于某一步所在的阶段时,该步处于活动状态,称该步为“活动步”。步处于活动状态时,相应的动作被执行:处于不活动状态时,相应的非存储型动作被停止执行。
4. 与步对应的动作或命令
可以将一个控制系统划分为被控系统和施控系统,例如在数控车床系统中,数控装置是施控系统,而车床是被控系统。对于被控系统,在某一步中要完成某些“动作”(action);对于施控系统,在某一步中则要向被控系统发出某些“命令”(command)。为了叙述方便,
下面将命令或动作统称为动作,并用矩形框中的文字或符号表示,该矩形框应与相应的符号相连。
如果某一步有几个动作,可以用图18中的两种画法来表示,但是并不隐含这些动作之间的任何顺序。说明命令的语句应清楚地表明该命令是存储型的还是非存储型的。例如某步的存储型命令“打开1号阀并保持”,是指该步为活动步时打开,该步为不活动时继续打开;非存储型命令“打开1号阀”,是指该步为活动步时打开,为不活动步时关闭。
除了以上的基本结构之外,使用动作的修饰词(见表1)可以在一步中完成不同的动作。修饰词允许在不增加逻辑的情况下控制动作。例如,可以使用修饰词L来限制配料阀打开的时间。
表1 动作的修饰词
|
N |
非存储型 |
当步变为不活动步时动作终止 |
|
S |
置位(存储) |
当步变为不活动步时动作继续,直到动作被复位 |
|
R |
复位 |
被修饰词S,SD,SL,或DS起动的动作被终止 |
|
L |
时间限制 |
步变为活动步时动作被起动,直到步变为不活动步或设定时间到 |
|
D |
时间延迟 |
步变为活动步时延迟定时器被起动,如果延迟之后步仍然是活动的,动作被起动和继续,直到步变不活动步 |
|
P |
脉冲 |
当步变为活动步,动作被起动并且只执行一次 |
|
SD |
存储与时间延迟 |
在时间延迟之后动作被起动,一直到动作被复位 |
|
DS |
延迟与存储 |
在延迟之后如果步仍然是活动的,动作被起动直到被复位 |
|
SL |
存储与时间限制 |
步变为活动步时动作被起动,一直到设定的时间到或动作被复位 |
在图17中,定时器T0的线圈应在M1为活动步时“通电”,M1为不活动步时断电,从这个意义上来说,T0的线圈相当于步M1的一个动作,所以将T0作为步M1的动作来处理。步M1下面的转换条件T0由在指定时时间到时闭合的T0的常开触点提供。因此动作框中的T0对应的是T0的线圈,转换条件T0对应的是T0的常开触点。
一个声控开关控制的照明灯控制程序的梯形图举例
试设计一个照明灯的控制程序。当接在I0.0上的声控开关感应到声音信号后,接在Q0.0上的照明灯可发光30S。如果在这段时间内声控开关又感应到声音信号,则时间间隔从头开始。这样可确保**后一次感应到声音信号后,灯光可维持30S的照明。
答案:参考梯形图
1)周期可调的脉冲信号发生器
如图5-6所示采用定时器T0产生一个周期可调节的连续脉冲。当X0常开触点闭合后,**次扫描到T0常闭触点时,它是闭合的,于是T0线圈得电,经过1s的延时,T0常闭触点断开。T0常闭触点断开后的下一个扫描周期中,当扫描到T0常闭触点时,因它已断开,使T0线圈失电,T0常闭触点又随之恢复闭合。这样,在下一个扫描周期扫描到T0常闭触点时,又使T0线圈得电,重复以上动作,T0的常开触点连续闭合、断开,就产生了脉宽为一个扫描周期、脉冲周期为1s的连续脉冲。改变T0的设定值,就可改变脉冲周期。
图5-6 周期可调的脉冲信号发生器
a)梯形图 b)时序图
(2)占空比可调的脉冲信号发生器
如图5-7所示为采用两个定时器产生连续脉冲信号,脉冲周期为5秒,占空比为3:2(接通时间:断开时间)。接通时间3s,由定时器T1设定,断开时间为2s,由定时器T0设定,用Y0作为连续脉冲输出端。
图5-7 占空比可调的脉冲信号发生器
a)梯形图 b)时序图
(3)顺序脉冲发生器
如图5-8a所示为用三个定时器产生一组顺序脉冲的梯形图程序,顺序脉冲波形如图5-8b所示。当X4接通,T40开始延时,同时Y31通电,定时l0s时间到,T40常闭触点断开,Y31断电。T40常开触点闭合,T41开始延时,同时Y32通电,当T41定时15s时间到,Y32断电。T41常开触点闭合,T42开始延时.同时Y33通电,T42定时20s时间到,Y33断电。如果X4仍接通,重新开始产生顺序脉冲,直至X4断开。当X4断开时,所有的定时器全部断电,定时器触点复位,输出Y31、Y32及Y33全部断电。
PLC输入模块简介
是FXlN系列的直流输入电路和内部电路的示意图。PLC外部的虚线框内是NPN管集电极开路输出的电子传感器(如接近开关)的示意图。图2-4是扩展模块FX2N?48ER?UAl/UL的交流输入电路的示意图。
当图2-3中的外接触点接通或图中的NPN型晶体管饱和导通时,电流经24V电源的正极(24V端子)、S/S端子、内部电路、X0等输入端子和外部的触点或晶体管,从0V端子流回24V电源的负极,使光耦合器中两个反芳联的发光二极管中的一个亮,光敏三极管饱和导通,CPU在输入阶段读入的是数字1;外接触点断开或.NPN晶体管处于截止状态时,光耦合器中的发光二极管熄灭,光敏三极管截止,CPU在输入阶段读入的是数字0。
当图2-4中的外接触点接通,或图中的PNP型晶体管饱和导通时,电流经24V电源的正极(24V端子)、外部的触点或晶体管、X0等输入端子、内部电路和S/S端子,从0V端子流回24V电源的负极,使光耦合器中的发光二极管亮,光敏三极管饱和导通。
输入电路中设有RC滤波电路,以防止由于输入触点抖动或外部干扰脉冲引起错误的输入信号。滤波电路延迟时间的典型值为10~20ms(信号上升沿)和20~50ms(信号下降沿),输入电流约5~10mA.