
西门子CPU模块6ES7355-1VH10-0AE0 西门子CPU模块6ES7355-1VH10-0AE0
微信15800846971
西门子**合作伙伴
详细信息
描述
引用是两个块之间的连接。
在LOGO!8中块连接器之间的连接组态和块参数之间的引用组态是标准化的。引用和组态现在就可以使用拖放来实现。本FAQ对比了LOGO!8设备和LOGO!0BA7设备之间组态引用的步骤。
组态LOGO!8需要安装LOGO!Soft Comfort 8.0或更高版本。
LOGO!8的LOGO!模块的步骤
- 在电路图中创建所需要的程序块。
- 使用拖放建立块连接器之间的连接。
- 单击每个程序块下的“display”(+)按钮来显示参数区。要创建引用的两个程序块都需要进行此操作。在每个块下面都会打开一个参数区,块参数会在表格中显示。“display”按钮只在可以使用或提供引用的块下显示。
-
在需要创建的引用块之间,将其中一个块输出连接的终端连接到另外一个块输入连接的终端。举例来说,可以用拖放来完成此操作。

图. 01
-
单击每个块下的“hide”(-)按钮来关闭参数区。

图. 02
注意
下面的工具可以用来编辑参数区(LOGO!8)
| 图标 | 功能 |
|
|
显示/隐藏所有块之间的引用线 |
|
|
显示所有块的参数区 |
|
|
隐藏所有块的参数区 |
到LOGO! 0BA7前的LOGO!模块的步骤
- 在电路图中创建需要的块。
- 使用拖放建立块的连接器之间的连接。
- 打开快的菜单,在里面通过双击块来组态引用。
-
在想要的参数上单击“引用”按钮。在下拉列表框中就会显示可以用来引用的块。单击想要的块来选定它。单击“OK”按钮来保存设置。

图. 03
块的引用和参数就会在电路中有绿色的显示。

图. 04
更多信息
关于“引用”的更详细的信息可以在LOGO!Soft Comfort(V1.7) 条目ID 24002694中还有LOGO!Soft Comfort online Help (V8.0)3.2.1.8部分, "Edit Parameter Field"章节,在条目ID 100782807中。
创建环境
本FAQ中的截图是在LOGO!Soft Comfort V8.0中创建的。
1 LOGO!App 简介
目前用户可以使用iTunes商店的应用软件LOGO!App连接和监控西门子LOGO!系列的PLC,软件名称如图1所示。在软件中成功组态LOGO! 设备的地址后,用户可以通过手机WIFI连接到LOGO!并可进行修改时钟和获取固件信息等操作。同时,用户可以监控输入/输出(以下简称I/O)状态,V存储区(以下简称VM)变量值和诊断信息,也可以添加监控的I/O和VM变量到趋势图查看一个概览图形。

图1应用程序名称
2 LOGO!App功能描述
2.1 接口配置
LOGO! App 支持IP地址和动态 DynDNS名称两种访问方式。 做法如下:
在图2中单击“Interface Configure”选项后进入图3界面单击 “By IP Address”选项,然后再单击 图标 ![]() ,进入图4设备添加界面。
,进入图4设备添加界面。

图2设置功能界面 图3设备访问方式界面
在图4中单击“Add”按钮,进入图5中进行设备名称和设备IP地址设置,此处我们设置设备名称为“MyLogo”,IP地址为“192.168.1.108”,**后单击“Save”按钮保存此配置,页面会自动转入到图6界面。

图4设备添加界面 图5设备添加界面
在图6中长按 ![]() 图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。
图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。

图6设备选择界面 图7设备选择界面
这时在图8中可以看到IP地址已经显示在界面中,然后点击“Save”图标,界面将自动转到图9。

图8设备访问方式界面
2.2 设置时钟
在图9中单击“Set Clock”选项将进入图10界面,在图10中可点击“Read”按钮查看LOGO!时间,也可点击“Current”按钮查看当前时间,之后进入图11界面。

图9设置功能界面 图10设备访问方式界面
在图11中LOGO!系统需要停机完成读取操作,单击“YES”图标进入图12,同样我们点击“Current”按钮来获取当前时间,然后通过“Set”按钮将当前屏幕中的时间更新到LOGO!中,此时进入图13界面。

图11获取LOGO!时钟界面 图12设备访问方式界面
在图13中点击“YES”按钮来完成更新后启动LOGO!的操作。

图13更新时钟界面
2.3 查看固件版本
在图14中单击“Show FW Version”选项后系统将返回LOGO!的固件版本如图15。

图14设置功能界面 图15固件版本界面
3 LOGO!App软件监控模式
3.1 I/O 状态监视器
在图16中选择“Monitor”图标,然后选择“I/O Status Monitor”选项后进入图17界面可观察到输入点的变化,在图17中用户选择需要监控的变量。可以通过点击“Edit”按钮进入图18中进行修改。

图16设置功能界面 图17 I/O监控界面
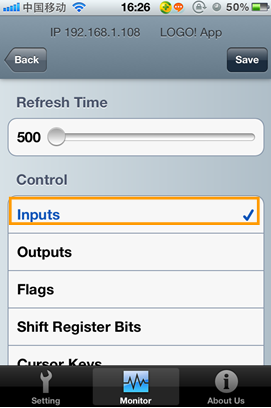
图18设置功能界面
3.2 VM列表监视器
在图19中单击“VM Table Monitor”选项进入图20的变量监控界面,点击“Add”按钮进入图21的变量添加界面。
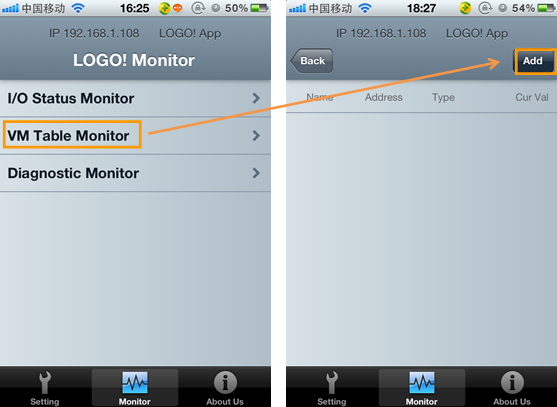
图19设置功能界面 图20 变量监控界面
在图21中填入变量名称、变量地址及变量数据类型后点击“Save”按钮,在变量监控界面图22中就可以监视或修改此变量的数值。

图21变量添加界面 图22 变量监控界面
此外,还可以用趋势图的方式来监控变量曲线。在图22中长按变量“speed”所在行,直至出现图23界面选择“Add To Chart”选项再返回图22界面,继续长按变量“speed”所在行,直至出现图24界面选择“Chart”选项,即进入图25的趋势图界面。

图23变量添加趋势图界面 图24 变量监控界面

图25趋势图界面
3.3 诊断监视器
在图26中单击“Diagnostic Monitor”选项后进入图27中可查看网络访问错误报警。

图26设置功能界面 图27 网络错误界面
如图28中选中“Network Access Error”标签后点击“Clear”按钮即可复位网络访问错误信息如图29所示。
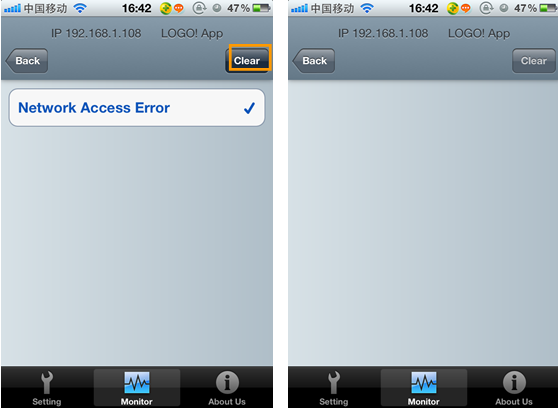
图28网络选择错误界面 图29 网络错误监控界面
6RA70 (三相桥B6C)
6RA7018-6DS22-0 3AC 400V 485V 30A 325V 5A
6RA7025-6DS22-0 60A 10A
6RA7028-6DS22-0 90A 10A
6RA7031-6DS22-0 125A 10A
6RA7075-6DS22-0 210A 15A
6RA7078-6DS22-0 280A 15A
6RA7081-6DS22-0 400A 25A
6RA7085-6DS22-0 600A 25A
6RA7087-6DS22-0 850A 30A
6RA7025-6GS22-0 3AC 575V 690V 60A 325V 5A
6RA7031-6GS22-0 125A 10A
6RA7075-6GS22-0 210A 15A
6RA7081-6GS22-0 400A 25A
6RA7085-6GS22-0 600A 25A
6RA7087-6GS22-0 800A 30A
6RA7086-6KS22-0 3AC 690V 900V 720A 30A.

PLC基础知识(PLC入门必看)
PLC的发展历程
在工业生产过程中,大量的开关量顺序控制,它按照逻辑条件进行顺序动作,并按照逻辑关系进行连锁保护动作的控制,及大量离散量的数据采集。传统上,这些功能是通过气动或电气控制系统来实现的。1968年美国GM(通用汽车)公司提出取代继电气控制装置的要求,第二年,美国数字公司研制出了基于集成电路和电子技术的控制装置,首次采用程序化的手段应用于电气控制,这就是**代可编程序控制器,称Programmable Controller(PC)。
个人计算机(简称PC)发展起来后,为了方便,也为了反映可编程控制器的功能特点,可编程序控制器定名为Programmable Logic Controller(PLC)。
上世纪80年代至90年代中期,是PLC发展**的时期,年增长率一直保持为30~40%。在这时期,PLC在处理模拟量能力、数字运算能力、人机接口能力和网络能力得到大幅度提高,PLC逐渐进入过程控制领域,在某些应用上取代了在过程控制领域处于统治地位的DCS系统。
PLC具有通用性强、使用方便、适应面广、可靠性高、抗干扰能力强、编程简单等特点。PLC在工业自动化控制特别是顺序控制中的地位,在可预见的将来,是无法取代的。
2 PLC的构成
从结构上分,PLC分为固定式和组合式(模块式)两种。固定式PLC包括CPU板、I/O板、显示面板、内存块、电源等,这些元素组合成一个不可拆卸的整体。模块式PLC包括CPU模块、I/O模块、内存、电源模块、底板或机架,这些模块可以按照一定规则组合配置。
3 CPU的构成
CPU是PLC的核心,起神经中枢的作用,每套PLC至少有一个CPU,它按PLC的系统程序赋予的功能接收并存贮用户程序和数据,用扫描的方式采集由现场输入装置送来的状态或数据,并存入规定的寄存器中,同时,诊断电源和PLC内部电路的工作状态和编程过程中的语法错误等。进入运行后,从用户程序存贮器中逐条读取指令,经分析后再按指令规定的任务产生相应的控制信号,去指挥有关的控制电路。
CPU主要由运算器、控制器、寄存器及实现它们之间联系的数据、控制及状态总线构成,CPU单元还包括外围芯片、总线接口及有关电路。内存主要用于存储程序及数据,是PLC不可缺少的组成单元。
在使用者看来,不必要详细分析CPU的内部电路,但对各部分的工作机制还是应有足够的理解。CPU的控制器控制CPU工作,由它读取指令、解释指令及执行指令。但工作节奏由震荡信号控制。运算器用于进行数字或逻辑运算,在控制器指挥下工作。寄存器参与运算,并存储运算的中间结果,它也是在控制器指挥下工作。
CPU速度和内存容量是PLC的重要参数,它们决定着PLC的工作速度,IO数量及软件容量等,因此限制着控制规模。
4 I/O模块
PLC与电气回路的接口,是通过输入输出部分(I/O)完成的。I/O模块集成了PLC的I/O电路,其输入暂存器反映输入信号状态,输出点反映输出锁存器状态。输入模块将电信号变换成数字信号进入PLC系统,输出模块相反。I/O分为开关量输入(DI),开关量输出(DO),模拟量输入(AI),模拟量输出(AO)等模块。
常用的I/O分类如下:
开关量:按电压水平分,有220VAC、110VAC、24VDC,按隔离方式分,有继电器隔离和晶体管隔离。
模拟量:按信号类型分,有电流型(4-20mA,0-20mA)、电压型(0-10V,0-5V,-10-10V)等,按精度分,有12bit,14bit,16bit等。
除了上述通用IO外,还有特殊IO模块,如热电阻、热电偶、脉冲等模块。
按I/O点数确定模块规格及数量,I/O模块可多可少,但其**数受CPU所能管理的基本配置的能力,即受**的底板或机架槽数限制。
5 电源模块
PLC电源用于为PLC各模块的集成电路提供工作电源。同时,有的还为输入电路提供24V的工作电源。电源输入类型有:交流电源(220VAC或110VAC),直流电源(常用的为24VDC)。
6 底板或机架
大多数模块式PLC使用底板或机架,其作用是:电气上,实现各模块间的联系,使CPU能访问底板上的所有模块,机械上,实现各模块间的连接,使各模块构成一个整体。
7 PLC系统的其它设备
7.1 编程设备:编程器是PLC开发应用、监测运行、检查维护不可缺少的器件,用于编程、对系统作一些设定、监控PLC及PLC所控制的系统的工作状况,但它不直接参与现场控制运行。小编程器PLC一般有手持型编程器,目前一般由计算机(运行编程软件)充当编程器。也就是我们系统的上位机。
7.2 人机界面:**简单的人机界面是指示灯和按钮,目前液晶屏(或触摸屏)式的一体式操作员终端应用越来越广泛,由计算机(运行组态软件)充当人机界面非常普及。
8 PLC的通信联网
依靠**的工业网络技术可以迅速有效地收集、传送生产和管理数据。因此,网络在自动化系统集成工程中的重要性越来越显著,甚至有人提出"网络就是控制器"的观点说法。
PLC具有通信联网的功能,它使PLC与PLC 之间、PLC与上位计算机以及其他智能设备之间能够交换信息,形成一个统一的整体,实现分散集中控制。多数PLC具有RS-232接口,还有一些内置有支持各自通信协议的接口。PLC的通信现在主要采用通过多点接口(MPI)的数据通讯、PROFIBUS 或工业以太网进行联网。
S7-200数据长度和数值范围
S7-200 寻址时,可以使用不同的数据长度。不同的数据长度表示的数值范围不同。S7-200 指令也分别需要不同的数据长度。
S7-200系列在存储单元所存放的数据类型有布尔型( BOOL)、整数型( INT )、实数型和字符串型四种。数据长度和数值范围如表6所列。
数据长度和数值范围
|
数据类型 |
数据长度 |
||
|
字节 (8位值) |
字 (16位值) |
双字 ( 32位值) |
|
|
无符号整数 |
0~255 |
0~65535 |
0~4294967295 |
|
有符号整数 |
-128~+127 |
-32768~+32767 |
-217483648~+2147483647 |
|
实数IEEE32位 |
|
|
+1.175495E-38~+3.402823E+ |
● 实数的格式
实数(浮点数)由32位单精度数表示,其格式按照ANSI/IEEE 754-1985标准中所描述的形式。实数按照双字长度来存取。对于S7-200来说,浮点数**到小数点后第六位。因而当使用一个浮点数常数时,**多可以指定到小数点后第六位。
● 实数运算的精度
在计算中涉及到非常大和非常小的数,则有可能导致计算结果不**。
● 字符串的格式
字符串指的是一系列字符,每个字符以字节的形式存储。字符串的**个字节定义了字符串的长度,也就是字符的个数。一个字符串的长度可以是0到254个字符,再加上长度字节,一个字符串的**长度为255个字节。而一个字符串常量的**长度为126字节。
● 布尔型数据(0或1)。
● S7-200CPU不支持数据类型检测
例如:可以在加法指令中使用VW100中的值作为有符号整数,同时也可以在异或指令中将VW100中的数据当作无符号的二进制数。
● S7-200提供各种变换指令,使用户能方便地进行数据制式及表达方式的变换。
根据指令语句表画出对应的梯形图的方法及举例
画出下列指令语句表对应的梯形图。
① LD 00000
OR 00001
AND-NOT 00002
OR 00003
LD 00004
AND 00005
OR 00006
AND-LD
OR 00007
OUT 10000
将指令语句转换成梯形图时,首先应将以LD指令为起点的电路块找出来,然后根据两个电路块后面的指令确定其相互关系。
① 图所示。

使用位处理技术,可开发出一个用户定义的键盘




当按下一个数字键时,其值被加入存储在单个数据字中的数据串中。这个程序可以对0到9999的数字进行操作。如果超过**限值,则**高位溢出、丢失。每个新近输入位放置在数据串的“单元”位置。经处理,输入的数字输出,给一个7段显示DSP1,表示当前输入数据串是什么。
程序通过对位数据找(首地址M110>左移4位(SFTL,指令),把输入数字加到当前串。为实现这个目的,“空”数据值被移入到位元件M110, 11, 12和13。当键入的数据值移入到寄存器D010后,D010内容与位数据找(首地址M110 )通过WOR相连结。因为D010的内容总是1个数字(一个按粗输入),即一个4位模式,可以说,D010的前4位被复制到位数据栈的预先“置空”区域中,此区域也为4位。
接着位数据找的内容被直接移出到一个7段显示的输出。同时使用BIN指令处理同一个位栈,其结果存在D000中。这是一个直接读取当前数字串的过程。
机械手的PLC控制系统和位置检测装置简介
(1)控制系统
有电气控制和射流控制两种,一般常见的为电气控制。它是机械手的重要组成部分,它支配着机械手按规定的程序运动,并记忆人们给与机械手的指令信息(如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构发出指令,必要时可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。
(2)位置检测装置
控制机械手执行机构的运动位置,并随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的进度达到设定位置。
1、常规检查与维护
2、外部故障的排除方法
1)总体检查

2)电源故障检查
3)运行故障检查
4)输入输出故障检查
5)外围环境的检查
6)故障的处理
3、内部错误的故障诊断
1)故障诊断的基本方法
2)利用CPU诊断缓冲区进行详细故障诊断
3)错误处理组织块
S7-200PLC数据传送指令
数据传送指令
|
名称 |
指令格式 (语句表) |
功能 |
操作数 |
|
|
单一传送指令 |
MOVB IN,OUT |
将IN的内容拷贝到OUT中 IN和OUT的数据类型应相同,可分别为字,字节,双字,实数 |
IN,OUT:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD IN还可以是常数 |
|
|
MOVW IN,OUT |
IN,OUT:VW,IW,QW,MW,SW,SMW,LW,T,C,AC,*VD,*AC,*LD IN还可以是AIW和常数 OUT还可以是AQW |
|||
|
MOVD IN,OUT |
IN,OUT:VD,ID,QD,MD,SD,SMD,LD,AC,*VD,*AC,*LD IN还可以是HC,常数,&VB,&IB,&QB,&MB,&T,&C |
|||
|
MOVR IN,OUT |
IN,OUT:VD,ID,QD,MD,SD,SMD,LD,AC,*VD,*AC,*LD IN还可以是常数 |
|||
|
BIR IN,OUT |
立即读取输入IN的值,将结果输出到OUT |
IN:IB OUT:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD |
||
|
BIW IN,OUT |
立即将IN单元的值写到OUT所指的物理输出区 |
IN:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD和常数 OUT:QB |
||
|
块传送指令 |
BMB IN,OUT,N |
将从IN开始的连续N个字节数据拷贝到从OUT开始的数据块 N的有效范围是1~255 |
IN,OUT:VB,IB,QB,MB,SB,SMB,LB,*VD,*AC,*LD N:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD和常数 |
|
|
BMW IN,OUT,N |
将从IN开始的连续N个字数据拷贝到从OUT开始的数据块 N的有效范围是1~255 |
IN,OUT:VW,IW,QW,MW,SW,SMW,LW,T,C,*VD,*AC,*LD IN还可以是AIW OUT还可以是AQW N:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD和常数 |
||
|
BMD IN,OUT,N |
将从IN开始的连续N个双字数据拷贝到从OUT开始的数据块 N的有效范围是1~255 |
IN,OUT:VD,ID,QD,MD,SD,SMD,LD, *VD,*AC,*LD N:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD和常数 |
学习PLC的基础实验
一、项目所需设备、工具、材料
表1 项目所需设备、工具、材料

二、 训练内容
按照前面的例子完成接线、输入程序,按照要求进行观察。
1、项目描述
(1)按照提供的PLC原理接线图完成接线;
(2)将提供的参考程序写入PLC;
(3)根据操作步骤操作,观察输入、输出设备的状态。通过计算机监视画面,观察并记录各元件的状态,并画出时序图;
(4)结合PLC程序执行过程,分析程序结果。
2 、实训要求
2.1 接线图与控制程序
按照图1,完成PLC控制系统的硬件连接。图中由于脉冲信号发生器的信号与按钮输入信号不同,因此,不能共用一个COM端。

按照图2提供的梯形图,利用计算机或手持编程器写入PLC。

2.2 观察要求
利用以上程序观察并认识程序的扫描周期和执行过程。
(1)调整编码器的频率至1KHZ。按下开关SB1,这时,程序中的定时器开始计时,而X0的上升沿使计数器的初始值复位,当前值为0。计数器重新开始计输入的脉冲数。1s钟后,定时时间到,计数停止。观察此时的计数器当前值是多少。从表面看,当前值应在1000左右,但实际上的当前值会少得多,为什么?
(2)调整编码器的频率至20HZ。重复(1)的操作,观察计数器的当前值,与(1)有什么不同?为什么?
(3)断开SB1,关闭编码器电源,按下开关SB2,两个指示灯为什么只亮一个?结合程序执行过程分析原因。
3 时序图分析
按下开关以后,部分继电器时序图如图3所示。根据观察结果,补充其他继电器的时序图。

西门子S7-214与SIMOVERT电机驱动器通信设计
S7-214通过与一台SIMOVERT微型主电机驱动器通信来起动,停止电机,以及改变输出到电机的频率。通信是通过S7-200自由通信口模式进行,使用USS5字协议。输入仿真器用来初始化发给电机驭动器的命令。

这个程序假定使用者己正确地将电机和微型主电机驭动器接好线,并且所有的电机和微型主电机驱动器的参数已诵讨人工设定了。必须把微型主电机驱动器设置在遥控方式。
![]()
![]()
程序结构

![]()
程序和注释
