
由于plc的高可靠性和接口的简易性,使用plc实现自动调平是一种很好的方法。假定最高支点高度为a,某一支点高度为b,按照升调平方法,则b点需要升高的垂直高度为ab,我们可以用下面的公式计算出该支腿升高ab时所需要的脉冲数n,从而控制该支腿升高的高度,达到调平目的。
式中δp是产生1mm位移的固定脉冲,可以用实验方法精确测出支点升高1mm所需的时间,编程控制加于液压开关的脉冲个数就可实现要求的位移。
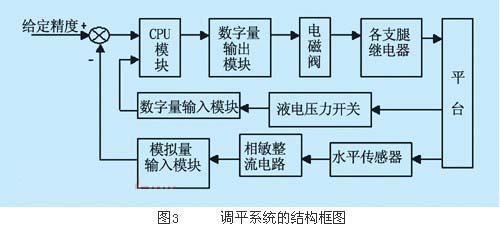
本系统选用德国siemens公司的simatics7-300系列的plc作为主控元件,其结构框图如图3所示。该plc系统包含电源模块、cpu模块、模拟量输入(ai)模块、数字量输入(di)模块和数字量输出(do)模块[3]。通过2个水平传感器检测平台的左右倾角和前后倾角是否满足精度。检测出的倾角信号经相敏整流电路后送给模拟量输入模块。模拟量输入模块用来输入水平检测信号,自动完成a/d转换,然后送给cpu模块,与给定水平度进行比较。cpu模块作为控制器,可以发送各种控制命令,接收并处理各种数据,对整个系统进行协调控制。cpu模块输出的控制量通过数字量输出模块,控制各支腿继电器动作,从而可以控制各支腿的升降,达到调平目的。液电压力开关可以检测各个支腿是否着地,避免虚腿调平。支腿着地时,对应的液电压力开关就会闭合,数字量输入模块对应的输入信号就为高电平;反之,支腿悬空时,对应的输入信号就为低电平。cpu模块根据读入的数字量做出相应的处理。
 ADVANCED MOTION ConTROLS B12CAMB BOARD X04 B12CAMB-ZXY1
ADVANCED MOTION ConTROLS B12CAMB BOARD X04 B12CAMB-ZXY1
BAILEY ConTROLS BOARD IEPAF02 infi 90
DOMONO A100 PUMP N097510 MICROPUMP I-DRIVER84822, GZD.Q57.JDS.DGB24
CANON SH CONT PCB BOARD BG6-4446,BG8-1657,BH8-2108-01
IAI ACTUATOR ConTROLLER SCON-C-60A-NP-2-2 FOR IF-SA2R-A-60-700-T2-X07
INDUSTRIAL SBC,PC,IPC,ROCKY-568EV V3.00
YASKAWA AC SERVO MOTOR SGMAV-02A3A2C
INDUSTRIAL SBC,PC,IPC,PCISA-158HV-AMP,P-MMX CPU 233MHZ
MITSUBISHI A2ACPU-P21-S1
S-S TECHNOLOGIES 5136-PFB-VME
ANELVA M-430HG/JIS ION
BROOKS WET PERSonALITY BOARD ASSY 002-6956-06/A12
BROOKS PERSONALITY IV ASSY 173801
PANASonIC AC SERVO DRIVER MUDS043A1A, MOTOR MUMS041A1F0S