品牌:西门子
起订:1台
供应:9999台
发货:1天内
信息标签:西门子驱动板6SN1118-0DG21-0AA1,供应,电子、电工,工控系统及装备
点击这里进行电话呼叫
点击这里QQ咨询
联系时一定要说在【贸易商务资源网】看到的将给您优惠!如果您也想和该公司一样在网站发信息有好排名,点击立即免费注册,发布产品推广。

西门子驱动板6SN1118-0DG21-0AA1 西门子驱动板6SN1118-0DG21-0AA1
描述
引用是两个块之间的连接。
在LOGO!8中块连接器之间的连接组态和块参数之间的引用组态是标准化的。引用和组态现在就可以使用拖放来实现。本FAQ对比了LOGO!8设备和LOGO!0BA7设备之间组态引用的步骤。
组态LOGO!8需要安装LOGO!Soft Comfort 8.0或更高版本。
LOGO!8的LOGO!模块的步骤
注意
下面的工具可以用来编辑参数区(LOGO!8)
| 图标 | 功能 |
|
|
显示/隐藏所有块之间的引用线 |
|
|
显示所有块的参数区 |
|
|
隐藏所有块的参数区 |
到LOGO! 0BA7前的LOGO!模块的步骤
更多信息
关于“引用”的更详细的信息可以在LOGO!Soft Comfort(V1.7) 条目ID 24002694中还有LOGO!Soft Comfort online Help (V8.0)3.2.1.8部分, "Edit Parameter Field"章节,在条目ID 100782807中。
创建环境
本FAQ中的截图是在LOGO!Soft Comfort V8.0中创建的。
1 LOGO!App 简介
目前用户可以使用iTunes商店的应用软件LOGO!App连接和监控西门子LOGO!系列的PLC,软件名称如图1所示。在软件中成功组态LOGO! 设备的地址后,用户可以通过手机WIFI连接到LOGO!并可进行修改时钟和获取固件信息等操作。同时,用户可以监控输入/输出(以下简称I/O)状态,V存储区(以下简称VM)变量值和诊断信息,也可以添加监控的I/O和VM变量到趋势图查看一个概览图形。

图1应用程序名称
2 LOGO!App功能描述
2.1 接口配置
LOGO! App 支持IP地址和动态 DynDNS名称两种访问方式。 做法如下:
在图2中单击“Interface Configure”选项后进入图3界面单击 “By IP Address”选项,然后再单击 图标 ![]() ,进入图4设备添加界面。
,进入图4设备添加界面。

图2设置功能界面 图3设备访问方式界面
在图4中单击“Add”按钮,进入图5中进行设备名称和设备IP地址设置,此处我们设置设备名称为“MyLogo”,IP地址为“192.168.1.108”,**后单击“Save”按钮保存此配置,页面会自动转入到图6界面。

图4设备添加界面 图5设备添加界面
在图6中长按 ![]() 图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。
图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。

图6设备选择界面 图7设备选择界面
这时在图8中可以看到IP地址已经显示在界面中,然后点击“Save”图标,界面将自动转到图9。

图8设备访问方式界面
2.2 设置时钟
在图9中单击“Set Clock”选项将进入图10界面,在图10中可点击“Read”按钮查看LOGO!时间,也可点击“Current”按钮查看当前时间,之后进入图11界面。

图9设置功能界面 图10设备访问方式界面
在图11中LOGO!系统需要停机完成读取操作,单击“YES”图标进入图12,同样我们点击“Current”按钮来获取当前时间,然后通过“Set”按钮将当前屏幕中的时间更新到LOGO!中,此时进入图13界面。

图11获取LOGO!时钟界面 图12设备访问方式界面
在图13中点击“YES”按钮来完成更新后启动LOGO!的操作。

图13更新时钟界面
2.3 查看固件版本
在图14中单击“Show FW Version”选项后系统将返回LOGO!的固件版本如图15。

图14设置功能界面 图15固件版本界面
3 LOGO!App软件监控模式
3.1 I/O 状态监视器
在图16中选择“Monitor”图标,然后选择“I/O Status Monitor”选项后进入图17界面可观察到输入点的变化,在图17中用户选择需要监控的变量。可以通过点击“Edit”按钮进入图18中进行修改。

图16设置功能界面 图17 I/O监控界面
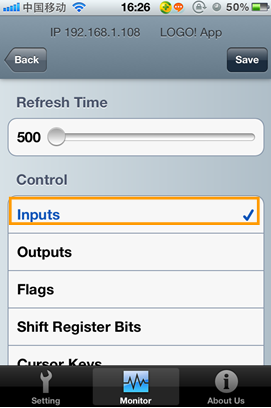
图18设置功能界面
3.2 VM列表监视器
在图19中单击“VM Table Monitor”选项进入图20的变量监控界面,点击“Add”按钮进入图21的变量添加界面。
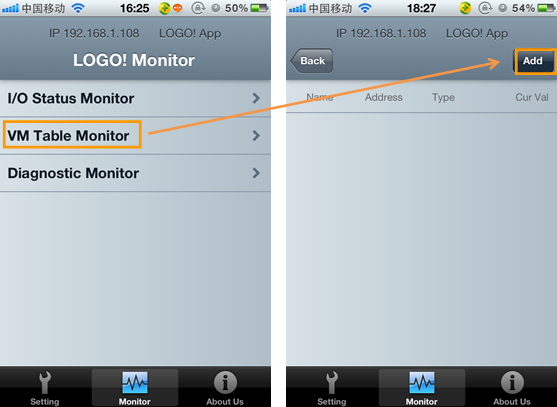
图19设置功能界面 图20 变量监控界面
在图21中填入变量名称、变量地址及变量数据类型后点击“Save”按钮,在变量监控界面图22中就可以监视或修改此变量的数值。

图21变量添加界面 图22 变量监控界面
此外,还可以用趋势图的方式来监控变量曲线。在图22中长按变量“speed”所在行,直至出现图23界面选择“Add To Chart”选项再返回图22界面,继续长按变量“speed”所在行,直至出现图24界面选择“Chart”选项,即进入图25的趋势图界面。

图23变量添加趋势图界面 图24 变量监控界面

图25趋势图界面
3.3 诊断监视器
在图26中单击“Diagnostic Monitor”选项后进入图27中可查看网络访问错误报警。

图26设置功能界面 图27 网络错误界面
如图28中选中“Network Access Error”标签后点击“Clear”按钮即可复位网络访问错误信息如图29所示。
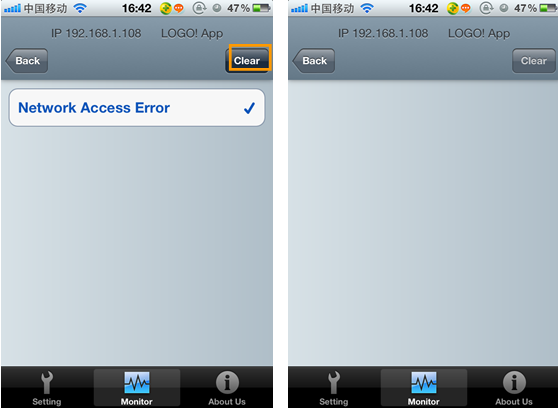
图28网络选择错误界面 图29 网络错误监控界面
6RA70 (三相桥B6C)
6RA7018-6DS22-0 3AC 400V 485V 30A 325V 5A
6RA7025-6DS22-0 60A 10A
6RA7028-6DS22-0 90A 10A
6RA7031-6DS22-0 125A 10A
6RA7075-6DS22-0 210A 15A
6RA7078-6DS22-0 280A 15A
6RA7081-6DS22-0 400A 25A
6RA7085-6DS22-0 600A 25A
6RA7087-6DS22-0 850A 30A
6RA7025-6GS22-0 3AC 575V 690V 60A 325V 5A
6RA7031-6GS22-0 125A 10A
6RA7075-6GS22-0 210A 15A
6RA7081-6GS22-0 400A 25A
6RA7085-6GS22-0 600A 25A
6RA7087-6GS22-0 800A 30A
6RA7086-6KS22-0 3AC 690V 900V 720A 30A.

三相异步电动机工作原理动画演示
三相异步电动机是一种常用的工业驱动电机,其转子的转速低于旋转磁场的转速,转子绕组因与磁场间存在着相对运动而感生电动势和电流,并与磁场相互作用产生电磁转矩,实现能量变换。与单相异步电动机相比,三相异步电动机运行性能好,并可节省各种材料。按转子结构的不同,三相异步电动机可分为笼式和绕线式两种。笼式转子的异步电动机结构简单、运行可靠、重量轻、价格便宜,得到了广泛的应用,其主要缺点是调速困难。绕线式三相异步电动机的转子和定子一样也设置了三相绕组并通过滑环、电刷与外部变阻器连接。下面请通过flash动画观看三相异步电动
异步电动机电源电压下降,若负载转矩不变,则定子电流必然增大.
如果电动机拖动的负载较小,除起动转矩有所降低外,不会影响电动机的寿命.
但如果电动机满载运行,由于电源电压低于额定电压;会使电动机电流超过额定值,影响电动机的寿
直流电磁式时间继电器断电延时原理是利用楞次定律,方法有两种:
1、阻尼铜套法:当线圈通电时,衔铁处于释放位置,气隙大,磁阻大,磁通小,所以阻尼铜套的作用很小,可不计延时作用,而线圈断电时,由于电流瞬间减小,根据楞次定律阻尼铜套中将产生一个感应电流,阻碍磁通的变化,维持衔铁不立即释放,直至磁通通过阻尼铜套电阻消耗逐渐使电磁吸力不足以克服反力时,衔铁释放,从而产生了断电延时。
2、短接线圈法:当电磁线圈断电时,立即把线圈短接,根据楞次定律线圈中将产生一个阻碍磁通变化的感应电流,维持衔铁不立即释放,从而产生断电延时。
延时范围的调整:
(1)改变释放弹簧的松紧度:释放弹簧越紧,释放磁通越大,延时越短。
(2)改变非磁性垫片厚度:垫片厚度增加,延时增加。
(3)为增大断电延时,对带阻尼套的时间继电器可兼用短接线圈法。
S7-200系列PLC乘除法指令应用举例梯形图
S7-200系列PLC乘除法指令应用举例,程序如图1所示。

LD I0.0
MUL AC1 VD100
DIV VW10 VD200图1
注意:因为VD100包含:VW100和VW102两个字,VD200包含:VW200和VW202两个字,所以在语句表指令中不需要使用数据传送指令。
S7-200CPU上的通信口是与RS-485兼容的9针D型连接器,符合欧洲标准EN 50170。下表给出了通信口的引脚分配。
表1 S7-200 CPU通信口引脚分配
|
连接器 |
针 |
PROFIBUS名称 |
端口0/端口1 |
|
|
1 |
屏蔽 |
逻辑地 |
|
2 |
24V返回 |
逻辑地 |
|
|
3 |
RS-485信号B |
RS-485信号B |
|
|
4 |
发送申请 |
RTS(TTL) |
|
|
5 |
5V返回 |
逻辑地 |
|
|
6 |
+5V |
+5V,100Ω串联电阻 |
|
|
7 |
+24V |
+24V |
|
|
8 |
RS-485信号A |
RS-485信号A |
|
|
9 |
不用 |
10位协议选择 |
|
|
连接器外壳 |
屏蔽 |
屏蔽 |
常用低压电器的主要种类和用途
常用低压电器的主要种类和用途如表1所示。
表1 常见的低压电器的主要种类及用途
序 号
类 别
主 要 品 种
用 途
1
断路器
塑料外壳式断路器
主要用于电路的过负荷保护、短路、欠电压、漏电压保护,也可用于不频繁接通和断开的电路
框架式断路器
限流式断路器
漏电保护式断路器
直流**断路器
2
刀开关
开关板用刀开关
主要用于电路的隔离,有时也能分断负荷
负荷开关
熔断器式刀开关
3
转换开关
组合开关
主要用于电源切换,也可用于负荷通断或电路的切换
换向开关
4
主令电器
按钮
主要用于发布命令或程序控制
限位开关
微动开关
接近开关
**转换开关
5
接触器
交流接触器
主要用于远距离频繁控制负荷,切断带负荷电路
直流接触器
6
起动器
磁力起动器
主要用于电动机的起动
星三起动器
自耦减压起动器
7
控制器
凸轮控制器
主要用于控制回路的切换
平面控制器
8
继电器
电流继电器
主要用于控制电路中,将被控量转换成控制电路所需电量或开关信号
电压继电器
时间继电器
中间继电器
温度继电器
热继电器
9
熔断器
有填料熔断器
主要用于电路短路保护,也用于电路的过载保护
无填料熔断器
半封闭插入式熔断器
**熔断器
自复熔断器
10
电磁铁
制动电磁铁
主要用于起重、牵引、制动等地方
起重电磁铁
牵引电磁铁
当然,低压电器作用远不止这些,随着科学技术的发展,新功能、新设备会不断出现。
对低压配电电器要求是灭弧能力强、分断能力好,热稳定性能好、限流准确等。对低压控制电器,则要求其动作可靠、操作频率高、寿命长并具有一定的负载能力。
数的取反取负指令实例——西门子S7系列PLC
|
指 令 |
说 明 |
|
INVI |
对累加器l低字中的16位整数求反码 |
|
INVD |
对累加器1中的32位整数求反码 |
|
NEGI |
对累加器1低字中的16位整数求补码。相当于乘-1 |
|
NEGD |
对累加器1中的32位整数求补码。相当于乘-1 |
|
NEGR |
对累加器1中的32位实数的符号位求反码 |
对累加器中的数求反码,即逐位将0变为1,1变为0。对累加器中的整数求补码,则逐位取反,再对累加器中的内容加1。对一个整数求补码相当于对该数乘以-1。实数取反是将符号位取反。
l INVI 指令

l INVD 指令

l NEGI 指令

l NEGD 指令

l NEGR 指令

信号灯控制系统——以转换为中心的编程方式梯形图举例
如图5-29所示为以转换为中心的编程方式设计的梯形图与功能表图的对应关系。图中要实现Xi对应的转换必须同时满足两个条件:前级步为活动步(Mi-1=1)和转换条件满足(Xi=1),所以用Mi-1和Xi的常开触点串联组成的电路来表示上述条件。两个条件同时满足时,该电路接通时,此时应完成两个操作:将后续步变为活动步(用SET Mi指令将Mi置位)和将前级步变为不活动步(用RST Mi-1 指令将Mi-1复位)。这种编程方式与转换实现的基本规则之间有着严格的对应关系,用它编制复杂的功能表图的梯形图时,更能显示出它的优越性。

图5-29 以转换为中心的编程方式
如图5-30所示为某信号灯控制系统的时序图、功能表图和梯形图。初始步时仅红灯亮,按下起动按钮X0,4s后红灯灭、绿灯亮,6s后绿灯和黄灯亮,再过5s后绿灯和黄灯灭、红灯亮。按时间的先后顺序,将一个工作循环划分为4步,并用定时器T0~T3来为3段时间定时。开始执行用户程序时,用M8002的常开触点将初始步M300置位。按下起动按钮X0后,梯形图第2行中M300和X0的常开触点均接通,转换条件X0的后续步对应的M301被置位,前级步对应的辅助继电器M300被复位。M301变为“1”状态后,控制Y0(红灯)仍然为“l”状态,定时器T0的线圈通电,4s后T0的常开触点接通,系统将由第2步转换到第3步,依此类推。

图5-30 某信号灯控制系统
a)时序图 b)功能表图 c)以转换为中心编程的梯形图
使用这种编程方式时,不能将输出继电器的线圈与SET、RST指令并联,这是因为图5-30中前级步和转换条件对应的串联电路接通的时间是相当短的,转换条件满足后前级步马上被复位,该串联电路被断开,而输出继电器线圈至少应该在某一步活动的全部时间内接通。
逻辑控制指令——西门子S7系列PLC
逻辑控制指令是指逻辑块内的跳转和循环指令。跳转或循环指令的操作数是地址标号,该地址标号指出程序要跳往何处,标号**多为4个字符,**个字符必须是字母,其余字符可为字母或数字。
1 无条件跳转指令
l JU 无条件跳转指令
l JL 跳转表格指令
2 件跳转指令
l JC 当RLO = 1时跳转
l JCN 当RLO = 0时跳转
l JCB 当RLO = 1并且BR = 1时跳转
l JNB 当RLO = 0并且BR = 0时跳转
l JBI 当BR = 1时跳转
l JNBI 当BR = 0时跳转
l JO 当OV = 1时跳转
l JOS 当OS = 1时跳转
l JZ 累加器1中的计算结果为零跳转
l JNZ 累加器1中的计算结果不为零跳转
l JP 累加器1中的计算结果为正数跳转
l JM 累加器1中的计算结果为负数跳转
l JPZ 累加器1中的计算结果大于等于零跳转
l JMZ 累加器1中的计算结果小于等于零跳转
l JUO 计算结果溢出跳转
3 程序控制指令
l BE 块结束指令
l BEC 条件块结束指令
RLO=1,结束当前块的扫描,将控制返还给调用块.
若RLO=0,则将RLO置1,程序继续在当前块内扫描
l BEU 无条件块结束指令
该指令无条件结束当前块的扫描,将控制返还给调用块起保停电路及点动控制电路
在自动控制电路中,起动按钮SB2,停止按钮SB1和交流接触器KM组成了起动、保持、停止(简称起保停电路)典型控制电路。图1-24是一个常用的**简单的控制电路。
起动时,合上隔离开关QS。引入三相电源,按下起动按钮SB2,接触器KM的线圈通电,接触器的主触头闭合,电动机接通电源直接起动运转。同时与SB2并联的常开辅助触头KM也闭合,使接触器线圈经两条路通电,这样,当SB2复位时,KM的线圈仍可通过KM触头继续通电,从而保持电动机的连续运行。这种依靠按接触器自身常开辅助触头而使其线圈保持通电的功能称为自保或自锁,这一对起自锁作用的触头称作自锁触头。

要使电动机停止运转,只要按下停止按钮SB1,将控制电路断开,接触器KM断电释放,KM的常开主触头将三相电源切断,电动机停止运转。当按钮SB1松开而恢复闭合时,接触器线圈已不能再依靠自锁触头通电了,因为原来闭合的触头早已随着接触器的断电而断开了。
起保停电路实现了电动机的连续运行控制。但有些生产机械要求按钮按下时,电动机运转,松开按钮时,电动机就停止,这就是点动控制。如图1-25图a所示。图b、c是实现点动与连续运行的电路。

