品牌:西门子
起订:1台
供应:9999台
发货:1天内
信息标签:西门子S120控制器模块6SL3126-1TE26-0AA3,供应,电子、电工,工控系统及装备
点击这里进行电话呼叫
点击这里QQ咨询
联系时一定要说在【贸易商务资源网】看到的将给您优惠!如果您也想和该公司一样在网站发信息有好排名,点击立即免费注册,发布产品推广。
西门子S120控制器模块6SL3126-1TE26-0AA3 西门子S120控制器模块6SL3126-1TE26-0AA3
|
上海隆彦自动化设备有限公司(西门子代理商) 联系人 李 工 |
||
| 全国直销: 15800846971 |
|
|
| 现货销售: | 021-61311951 | |
| 腾讯咨询: | 3192212451 | |
|
100%的西门子进货渠道给你100%的放心品质。
|
||
上海隆彦自动化设备有限公司主要经营: 西门子PLC模块,s7-200CN、s7-300、s7-400、s7-1200、ET200,西门子变频器,西门子触摸屏,西门子交换机,西门子工控机,西门子V80伺服系统,西门子V90伺服系统,西门子DP总线,西门子总线连接器

根据实际应用情况,SIMOREG®直流驱动系统经常是价格**有利的驱动器解决方案。在可靠性、操作友好性和性能方面有许多优点。如果您正在寻找具有**经济有效性的直流驱动系统解决方案,那么您完全可以信赖具有**高输出和集成智能能力的 SIMOREG DC-MASTER 驱动器调速器。具体说来,它们具有西门子产品**的特点:全集成自动化。这意味着您可以从它们能够完全的集成到西门子系统环境中获益:在进行工程组态/组态和编程时,使用公共的数据库和集成通讯方式——使您可以在多方面节省资金!

西门子 SIMOREG 产品系列可以通过简单、同意的操作员控制体系进行自我诊断。无需编程知识,所有的设置都可以全部用电子方式完成。如果您对用户友好性的进行试运行感兴趣,那么通过一台 PC 就可以实现带菜单提示的启动调试。
此外,SIMOREG DC-MASTER 采用 BICO 技术,提高了软件的功能性,可以有效的缩短工程组态时间,并降低成本。
SIMOREG DC-MASTER 系列现有多种版本——在输出范围上从
6.3 kW 到 2500 kW,还包括电枢和励磁供电、单机和四象限驱动系统等版本。
它可以完全集成到任何自动化环境中
可以用模块方式扩展——从标准应用到高性能解决方案
通过并联**高可扩展到 18000A
额定供电电压 400V到 950V
通过对所有设置全部实现电子方式的参数化缩短了试运行时间
统一的操作员控制体系
SIMOVERT MASTERDRIVES 超紧凑型
SIMOVERT MASTERDRIVES 是交流变频器。它们可将交流电机转变为高精度可变速驱动器。此系列驱动器在全球范围内通用,适用于 230 - 690 V 范围内的全部供电电压,并且进行了全球范围的认证。
SIMOVERT MASTERDRIVES 是一个变频器系统。它们是一种模块化的单元系列,可**满足每一种应用要求,并可在所有工业领域内使用。它们拥有可满足各种要求的**闭环控制:SIMOVERT MASTERDRIVES VC 采用频率控制和矢量控制,而 SIMOVERT MASTERDRIVES MC 采用适用于极高动态性能的伺服控制。 极为节省空间的电源
西门子具有超紧凑设计的 SIMOVERT MASTERDRIVES 系列变频器完美适合需要在极小空间内提供极高额定功率的所有应用。这个变频器系统现已通过逆变器(直流转交流装置)进行扩展,功率高达 37 kW (50 HP)。
请阅读或订购我们的市场营销资料。
SIMOVERT MASTERDRIVES 经过设计,已进行**的统一:它们拥有统一的操作员控制方式,可根据需要进行组合,甚至可带有具有不同控制方式的单元,并且在设计上也是统一的。不管是单个驱动器还是多电机驱动器,它们始终会以系统模块的形式提供**解决方案。
功能特点
可进行模块化扩展:使用操作员控制面板、终端扩展模块、制动模块、输入和输出滤波器
转速和转矩精度较高
具有优异的动态性能
在低转速下具有极平稳的运行特性
具有较高过载能力
具有较高功率密度
具有**性价比
可使用 PATH 方便、友好地进行组态
输出范围
0.55 - 710 kW SIMOVERT MASTERDRIVES MC (400V)
2.2 - 6000 kW SIMOVERT MASTERDRIVES VC
SINAMICS G130 内置式变频器设计用于机器制造和工厂建设中使用的交流变频器。
具有较高性能, 可满足各种负载类型的单电机驱动应用。
无传感器矢量控制的控制精度适合大多数应用,因此,无需使用附加实际转速编码器。
SINAMICS G130 可以提供一种经济的驱动解决方案,它能够通过丰富的组件和选配件满足各种各样的用户需求。

|
电源电压: |
输出范围: |
|
供电系统: |
TN/TT 或 IT |
|
线路频率: |
47 ~ 63 Hz |
|
输出频率: |
0 ~ 300 Hz |
|
控制方法: |
带编码器的闭环矢量控制或 V/f 控制 |
|
固定频率: |
15 个固定频率加 1 个基本频率,可编程 |
|
跳跃频率频带: |
4,可编程 |
|
用户接线排: |
数字量输入/输出 |
|
通讯接口: |
标配 PROFIBUS DP 接口 |
|
制动模式: |
制动模式作为系统组件 |
|
防护等级: |
IP00 |
|
冷却方式: |
内部风扇(强制空气冷却) |
|
噪声等级: |
≤ 72 dB (A),50 Hz 电源频率下 |
|
法规符合性: |
CE, cULus(不久将可供货) |
|
软件功能: |
- 因电源故障而发生操作中断时可自动重新启动 |
|
保护功能: |
电机和电源部分的热监视 |
|
安全功能: |
STO, SS1 (驱动系统的集成安全性功能) |
|
适宜的电机: |
感应电机 |
SINAMICS G130 变频装置为系统集成商和机器制造商提供了一种可满足特定应用要求的模块化传动系统.
SINAMICS G130 变频器由两个独立的模块部分组成:
- 功率单元
- 控制单元
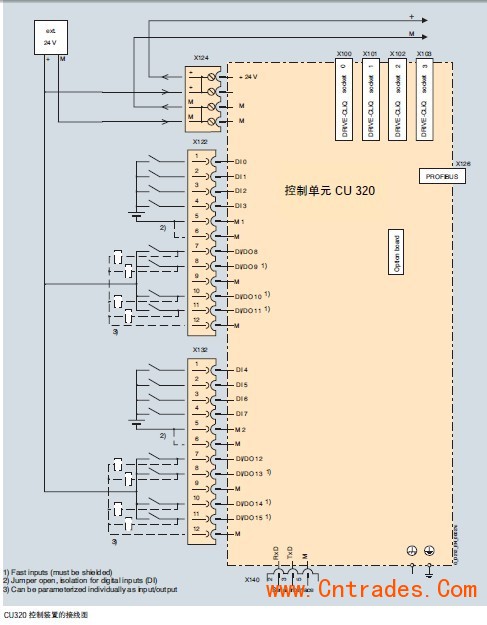
控制单元可单独放置,也可内置在装置中。功率单元内留有一个插槽,用于安装控制单元.
通过端子板或PROFIBUS端口轻松实现对变频器的调试和控制。 界面友好的AOP30高级操作面板可进行启动和本地操控。控制模块可通过控制单元上的附加选件进行扩充。

SINAMICS G130 和 SIMATIC S7 组态举例
西门子S120控制器模块6SL3126-1TE26-0AA3

星形-三角形减压起动控制线路原理与实现
1.Y—Δ降压起动的原理:把正常运行时,定子绕组应作三角形联接的笼型异步电动机在起动时接成Y形,起动电压从380V→220V,从而减小起动电流。待转速上升后,再改接成Δ联结,投入正常运行。这是一种**常用的降压起动。起动时绕组承受的电压为额定电压的1/![]() 倍,起动电流为三角形接法时的1/3。
倍,起动电流为三角形接法时的1/3。

2.控制过程:
主回路:合上QS→控制线路接上电源
控制回路:
(1)SB2按钮按下→KT、KM3线圈得电→KM3触头闭合→KM1线圈得电自锁→KM1、KM3主触头闭合→电动机星形联接起动。
(2)KT整定时间到→延时断开触点断开→KM3线圈失电→KM3常开触头断开,常闭复位→KT失电,KM2线圈得电→KM2主触头闭合→电动机三角形联接正常运行。
3.Y—Δ降压起动投资少,线路简单,操作方便,但起动转矩小,适用于空载或轻载场合,普遍应用于空载或轻载的正常运行是三角形联结的笼型异步电动机起动。
西门子PLC表取数指令简介
从数据表中取数有**先出(FIFO)和后进先出(LIFO)两种。执行表取数指令后,实际填表数EC值自动减1。
**先出指令(FIFO):移出表格(TBL)中的**个数(数据0),并将该数值移至DATA指定存储单元,表格中的其他数据依次向上移动一个位置。
后进先出指令(LIFO):将表格(TBL)中的**后一个数据移至输出端DATA指定的存储单元,表格中的其他数据位置不变。
表取数指令格式如表1所示。
表1表取数指令格式
|
LAD |
|
|
|
STL |
FIFO TBL,DATA |
LIFO TBL,DATA |
|
说明 |
输入端TBL为数据表的首地址,输出端DATA为存放取出数值的存储单元 |
|
|
操作数及数据类型 |
TBL:VW, IW, QW, MW, SW, SMW, LW, T, C, *VD, *LD, *AC。数据类型:字。 DATA:VW, IW, QW, MW, SW, SMW, LW, AC, T, C, AQW, *VD, *LD, *AC。 数据类型:整数。 |
|
使ENO = 0的错误条件:0006(间接地址),0091(操作数超出范围),SM1.5(空表)SM4.3(运行时间)。
对特殊标志位的影响:SM1.5(试图从空表中取数,SM1.5=1)。
PLC是按什么样的工作方式进行工作的,要完成哪些控制任务
PLC是按什么样的工作方式进行工作的?它的中心工作过程分哪几个阶段?在每个阶段主要完成哪些控制任务?
下面来回答这个问题:
PLC是按集中输入、集中输出,周期性循环扫描的方式进行工作的。它的中心工作过程分输入采样阶段、程序执行阶段、输出刷新阶段。
在输入采样阶段,首先扫描所以输入端子,并将各输入状态存入相对应的输入映像寄存器中,此时输入映像寄存器被刷新,它与外界隔离,其内容保持不变,直到下一个扫描周期的输入采样阶段。
在程序执行阶段,PLC按从左到右、从上到下的步骤顺序执行程序。
在输出刷新阶段中,元件映像寄存器中所有输出继电器的状态一起转存到输出锁存器中,通过一定方式集中输出,**后经过输出端子驱动外部负责,在下一个输出刷新阶段开始之前,输出锁存器的状态不会改变。
根据硬件结构的不同,可以将PLC分为整体式、模块式和混合式。
1.整体式PLC
整体式又叫做单元式或机箱式,它的体积小、价格低,对箱体式PLC,有一块CPU板、I/O板、显示面板、内存块、电源等,当然按CPU性能分成若干型号,并按I/O点数又有若干规格。对模块式PLC,有CPU模块、I/O模块、内存、电源模块、底板或机架。无任哪种结构类型的PLC,都属于总线式开放型结构,其I/O能力可按用户需要进行扩展与组合。
2.模块式PLC
大、中型PLC一般采用模块式结构,它由机架和模块组成,模块插在模块插座上,后者焊接在机架中的总线连接板上,有不同槽数的机架供用户选用,如果一个机架容纳不下选用的模块,可以增设一个或数个扩展机架,各机架之间用接口模块和电缆相连。
用户可以选用不同档次的CPU模块、品种繁多的I/O模块和特殊功能块,对硬件配置的选择余地较大,维修时更换模块也很方便。
3.CPU模块中的存储器
存储器分为系统程序存储器和用户程序存储器,系统程序相当于个人计算机中的操作系统,它使PLC具有基本的智能,能完成PLC设计者的规定的各种工作。系统程序由PLC的生厂家设计并固定化在ROM(只读存储器)中,用户不能读取。用户程序由用户设计,它使PLC能完成用户要球的特定功能,用户程序存储器的容量以字节(B)为单位。
(1).随机存取存储器(RAM)
用户可以用编程装置读出RAM中的内容,也可以将用户程序写入RAM,因此RAM又叫读/写存储器。RAM的工作速度高、价格便宜、改写方便。
(2).只读存储器(ROM)
ROM的内容只能读出,不能写入。
(3).可以电檫出可编程的只读存储器(EEPROM)
S7-200用EEPROM来存储用户程序和长期保存的重要数据。
4.I/O模块
各I/O点的通/断状态用发光二极管(LED)显示,PLC与外部接线的连接一般用接线端子,某些模块使用可以拆卸的插座型端子板,不需断开端子板上的连接线,就可以迅速的更换模块。
输入模块:PLC通过输入模块来接收和采集输入信号,通过输出模块控制接触器、电磁阀、电磁铁、调速装置等执行器,PLC控制的另一类外部负载是指示灯、数字显示装置和报警装置等。输入电路中设有RC滤波电路,以防止由于输入触点抖动或外部干扰脉冲引起的错误输入信号。
输出模块:输出模块的率放大元件有大功率晶体管和场效应管(驱动直流负载)、双向可控硅(驱动交流负载)和小型继电器,继电器可以驱动交流负载或直流负载。输出电流的典型值为0.5—2A,负载电源由外部现场提供。
S7-200 CPU22X 系列PLC I/O 点数扩展和编址
S7-200 CPU22X 系列的每种主机所提供的本机I/O点的I/O地址是固定的,进行扩展时,可以在CPU右边连接多个扩展模块。如图所示,每个扩展模块的组态地址编号取决于各模块的类型和该模块在I/O链中所处的位置。输入与输出模块的地址不会冲突,模拟量控制模块地址也不会影响数字量。
编址方法是同样类型输入或输出点的模块在链中按所处的位置而递增,这种递增是按字节进行的,如果CPU或模块在为物理I/0点分配地址时未用完一个字节,那些未用的位也不能分配给I/O链中的后续模块。
例如,某一控制系统选用CPU224,系统所需的输入/输出点数为:数字量输入24点、数字量输出20点、模拟量输入6点和模拟量输出2点。
本系统可有多种不同模块的选取组合,并且各模块在I/O链中的位置排列方式也可能有多种,图2所示为其中的一种模块连接形式。表1所示为其对应的各模块的编址情况。

|
图2 模块连接形式 |
表1 各模块的编址
|
主机 |
模块 1 |
模块 2 I/O |
模块 3 |
模块 4 |
模块 5 |
|
I0.0 Q0.0 |
I2.0
|
Q2.0
|
AIW0 AQW0
|
I3.0 Q3.0
|
AIW8 AQW4
AIW10
|
● 同类型输入或输出的模块按顺序进行编制。
● 数字量模块总是保留以8位(1个字节)递增的过程映象寄存器空间。如果模块没有给保留字节中每一位提供相应的物理点,那些未用位不能分配给I/O链中的后续模块。对于输入模块,这些保留字节中未使用的位会在每个输入刷新周期中被清零。
● 模拟量I/O点总是以两点递增的方式来分配空间。如果模块没有给每个点分配相应的物理点,则这些I/O点会消失并且不能够分配给I/O链中的后续模块。
小车控制系统——使用STL指令的编程方式梯形图举例
许多PLC厂家都设计了专门用于编制顺序控制程序的指令和编程元件,如美国GE公司和GOULD公司的鼓形控制器、日本东芝公司的步进顺序指令、三菱公司的步进梯形指令等。
步进梯形指令(Step Ladder Instruction)简称为STL指令。FX系列就有STL指令及RET复位指令。利用这两条指令,可以很方便地编制顺序控制梯形图程序。
FX2N系列PLC的状态器S0~S9用于初始步,S10~S19用于返回原点,S20~S499为通用状态,S500~S899有断电保持功能,S900~S999用于报警。用它们编制顺序控制程序时,应与步进梯形指令一起使用。FX系列还有许多用于步进顺控编程的特殊辅助继电器以及使状态初始化的功能指令IST,使STL指令用于设计顺序控制程序更加方便。
使用STL指令的状态器的常开触点称为STL触点,它们在梯形图中的元件符号如图5-31所示。图中可以看出功能表图与梯形图之间的对应关系,STL触点驱动的电路块具有三个功能:对负载的驱动处理、指定转换条件和指定转换目标。

图5-31 STL指令与功能表图
除了后面要介绍的并行序列的合并对应的梯形图外,STL触点是与左侧母线相连的常开触点,当某一步为活动步时,对应的STL触点接通,该步的负载被驱动。当该步后面的转换条件满足时,转换实现,即后续步对应的状态器被SET指令置位,后续步变为活动步,同时与前级步对应的状态器被系统程序自动复位,前级步对应的STL触点断开。
使用STL指令时应该注意以下一些问题:
1)与STL触点相连的触点应使用LD或LDI指令,即LD点移到STL触点的右侧,直到出现下一条STL指令或出现RET指令,RET指令使LD点返回左侧母线。各个STL触点驱动的电路一般放在一起,**后一个电路结束时—定要使用RET指令。
2)STL触点可以直接驱动或通过别的触点驱动Y、M、S、T等元件的线圈,STL触点也可以使Y、M、S等元件置位或复位。
3)STL触点断开时,CPU不执行它驱动的电路块,即CPU只执行活动步对应的程序。在没有并行序列时,任何时候只有一个活动步,因此大大缩短了扫描周期。
4)由于CPU只执行活动步对应的电路块,使用STL指令时允许双线圈输出,即同一元件的几个线圈可以分别被不同的STL触点驱动。实际上在一个扫描周期内,同一元件的几条OUT指令中只有一条被执行。
5)STL指令只能用于状态寄存器,在没有并行序列时,一个状态寄存器的STL触点在梯形图中只能出现一次。
6)STL触点驱动的电路块中不能使用MC和MCR指令,但是可以使用CJP和EJP指令。当执行CJP指令跳人某一STL触点驱动的电路块时,不管该STL触点是否为“1”状态,均执行对应的EJP指令之后的电路。
7)与普通的辅助继电器一样,可以对状态寄存器使用LD、LDI、AND、ANI、OR、ORI、SET、RST、OUT等指令,这时状态器触点的画法与普通触点的画法相同。
8)使状态器置位的指令如果不在STL触点驱动的电路块内,执行置位指令时系统程序不会自动将前级步对应的状态器复位。
如图5-32所示小车一个周期内的运动路线由4段组成,它们分别对应于S31~S34所代表的4步,S0代表初始步。

图5-32 小车控制系统功能表图与梯形图
假设小车位于原点(**左端),系统处于初始步,S0为“1”状态。按下起动按钮X4,系统由初始步S0转换到步S31。S31的STL触点接通,Y0的线圈“通电”,小车右行,行至**右端时,限位开关X3接通,使S32置位,S31被系统程序自动置为“0”状态,小车变为左行,小车将这样一步一步地顺序工作下去,**后返回起始点,并停留在初始步。图5-32中的梯形图对应的指令表程序如表5-3所示.。
表5-3 小车控制系统指令表
|
LD SET STL LD SET STL |
M8002 S0 S0 X4 S31 S31 |
OUT LD SET STL OUT LD |
Y0 X3 S32 S32 Y1 X1 |
SET STL OUT LD SET STL |
S33 S33 Y0 X2 S34 S34 |
OUT LD SET RET |
Y1 X0 S0 |

