品牌:西门子
起订:1台
供应:9999台
发货:1天内
信息标签:西门子6SL3330-7TE32-6AA3,供应,电子、电工,工控系统及装备
点击这里进行电话呼叫
点击这里QQ咨询
联系时一定要说在【贸易商务资源网】看到的将给您优惠!如果您也想和该公司一样在网站发信息有好排名,点击立即免费注册,发布产品推广。

西门子6SL3330-7TE32-6AA3 西门子6SL3330-7TE32-6AA3
描述
引用是两个块之间的连接。
在LOGO!8中块连接器之间的连接组态和块参数之间的引用组态是标准化的。引用和组态现在就可以使用拖放来实现。本FAQ对比了LOGO!8设备和LOGO!0BA7设备之间组态引用的步骤。
组态LOGO!8需要安装LOGO!Soft Comfort 8.0或更高版本。
LOGO!8的LOGO!模块的步骤
注意
下面的工具可以用来编辑参数区(LOGO!8)
| 图标 | 功能 |
|
|
显示/隐藏所有块之间的引用线 |
|
|
显示所有块的参数区 |
|
|
隐藏所有块的参数区 |
到LOGO! 0BA7前的LOGO!模块的步骤
更多信息
关于“引用”的更详细的信息可以在LOGO!Soft Comfort(V1.7) 条目ID 24002694中还有LOGO!Soft Comfort online Help (V8.0)3.2.1.8部分, "Edit Parameter Field"章节,在条目ID 100782807中。
创建环境
本FAQ中的截图是在LOGO!Soft Comfort V8.0中创建的。
1 LOGO!App 简介
目前用户可以使用iTunes商店的应用软件LOGO!App连接和监控西门子LOGO!系列的PLC,软件名称如图1所示。在软件中成功组态LOGO! 设备的地址后,用户可以通过手机WIFI连接到LOGO!并可进行修改时钟和获取固件信息等操作。同时,用户可以监控输入/输出(以下简称I/O)状态,V存储区(以下简称VM)变量值和诊断信息,也可以添加监控的I/O和VM变量到趋势图查看一个概览图形。

图1应用程序名称
2 LOGO!App功能描述
2.1 接口配置
LOGO! App 支持IP地址和动态 DynDNS名称两种访问方式。 做法如下:
在图2中单击“Interface Configure”选项后进入图3界面单击 “By IP Address”选项,然后再单击 图标 ![]() ,进入图4设备添加界面。
,进入图4设备添加界面。

图2设置功能界面 图3设备访问方式界面
在图4中单击“Add”按钮,进入图5中进行设备名称和设备IP地址设置,此处我们设置设备名称为“MyLogo”,IP地址为“192.168.1.108”,**后单击“Save”按钮保存此配置,页面会自动转入到图6界面。

图4设备添加界面 图5设备添加界面
在图6中长按 ![]() 图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。
图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。

图6设备选择界面 图7设备选择界面
这时在图8中可以看到IP地址已经显示在界面中,然后点击“Save”图标,界面将自动转到图9。

图8设备访问方式界面
2.2 设置时钟
在图9中单击“Set Clock”选项将进入图10界面,在图10中可点击“Read”按钮查看LOGO!时间,也可点击“Current”按钮查看当前时间,之后进入图11界面。

图9设置功能界面 图10设备访问方式界面
在图11中LOGO!系统需要停机完成读取操作,单击“YES”图标进入图12,同样我们点击“Current”按钮来获取当前时间,然后通过“Set”按钮将当前屏幕中的时间更新到LOGO!中,此时进入图13界面。

图11获取LOGO!时钟界面 图12设备访问方式界面
在图13中点击“YES”按钮来完成更新后启动LOGO!的操作。

图13更新时钟界面
2.3 查看固件版本
在图14中单击“Show FW Version”选项后系统将返回LOGO!的固件版本如图15。

图14设置功能界面 图15固件版本界面
3 LOGO!App软件监控模式
3.1 I/O 状态监视器
在图16中选择“Monitor”图标,然后选择“I/O Status Monitor”选项后进入图17界面可观察到输入点的变化,在图17中用户选择需要监控的变量。可以通过点击“Edit”按钮进入图18中进行修改。

图16设置功能界面 图17 I/O监控界面
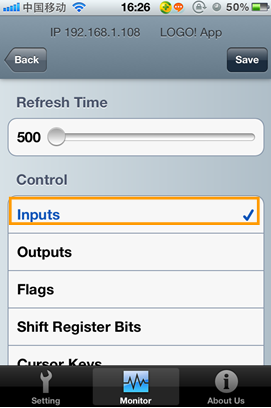
图18设置功能界面
3.2 VM列表监视器
在图19中单击“VM Table Monitor”选项进入图20的变量监控界面,点击“Add”按钮进入图21的变量添加界面。
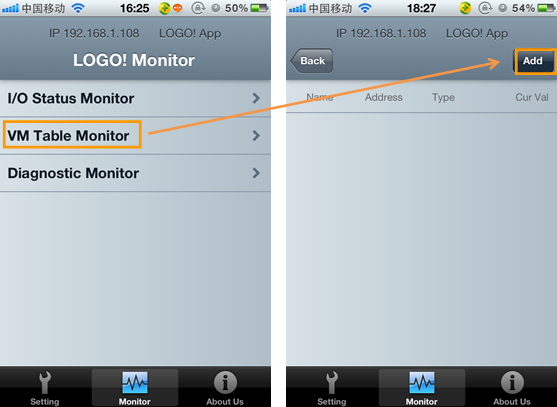
图19设置功能界面 图20 变量监控界面
在图21中填入变量名称、变量地址及变量数据类型后点击“Save”按钮,在变量监控界面图22中就可以监视或修改此变量的数值。

图21变量添加界面 图22 变量监控界面
此外,还可以用趋势图的方式来监控变量曲线。在图22中长按变量“speed”所在行,直至出现图23界面选择“Add To Chart”选项再返回图22界面,继续长按变量“speed”所在行,直至出现图24界面选择“Chart”选项,即进入图25的趋势图界面。

图23变量添加趋势图界面 图24 变量监控界面

图25趋势图界面
3.3 诊断监视器
在图26中单击“Diagnostic Monitor”选项后进入图27中可查看网络访问错误报警。

图26设置功能界面 图27 网络错误界面
如图28中选中“Network Access Error”标签后点击“Clear”按钮即可复位网络访问错误信息如图29所示。
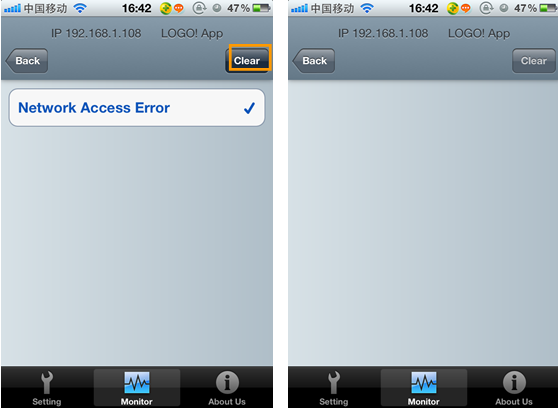
图28网络选择错误界面 图29 网络错误监控界面
6RA70 (三相桥B6C)
6RA7018-6DS22-0 3AC 400V 485V 30A 325V 5A
6RA7025-6DS22-0 60A 10A
6RA7028-6DS22-0 90A 10A
6RA7031-6DS22-0 125A 10A
6RA7075-6DS22-0 210A 15A
6RA7078-6DS22-0 280A 15A
6RA7081-6DS22-0 400A 25A
6RA7085-6DS22-0 600A 25A
6RA7087-6DS22-0 850A 30A
6RA7025-6GS22-0 3AC 575V 690V 60A 325V 5A
6RA7031-6GS22-0 125A 10A
6RA7075-6GS22-0 210A 15A
6RA7081-6GS22-0 400A 25A
6RA7085-6GS22-0 600A 25A
6RA7087-6GS22-0 800A 30A
6RA7086-6KS22-0 3AC 690V 900V 720A 30A.

S7-200PLC移位与循环移位指令
移位与循环移位指令
|
名称 |
指令格式 (语句表) |
功能 |
操作数 |
|
字节移位指令 |
SRB OUT,N |
将字节OUT右移N位,**左边的位依次用0填充 |
IN,OUT,N:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD IN和N还可以是常数 |
|
SLB OUT,N |
将字节OUT左移N位,**右边的位依次用0填充 |
||
|
RRB OUT,N |
将字节OUT循环右移N位,从**右边移出的位送到OUT的**左位 |
||
|
RLB OUT,N |
将字节OUT循环左移N位,从**左边移出的位送到OUT的**右位 |
||
|
字移位指令 |
SRW OUT,N |
将字OUT右移N位,**左边的位依次用0填充 |
IN,OUT:VW,IW,QW,MW,SW,SMW,LW,T,C,AC,*VD,*AC,*LD IN还可以是AIW和常数 N:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD,常数 |
|
SLW OUT,N |
将字OUT左移N位,**右边的位依次用0填充 |
||
|
RRW OUT,N |
将字OUT循环右移N位,从**右边移出的位送到OUT的**左位 |
||
|
RLW OUT,N |
将字OUT循环左移N位,从**左边移出的位送到OUT的**右位 |
||
|
双字移位指令 |
SRD OUT,N |
将双字OUT右移N位,**左边的位依次用0填充 |
IN,OUT:VD,ID,QD,MD,SD,SMD,LD,AC,*VD,*AC,*LD IN还可以是HC和常数 N:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD,常数 |
|
SLD OUT,N |
将双字OUT左移N位,**右边的位依次用0填充 |
||
|
RRD OUT,N |
将双字OUT循环右移N位,从**右边移出的位送到OUT的**左位 |
||
|
RLD OUT,N |
将双字OUT循环左移N位,从**左边移出的位送到OUT的**右位 |
||
|
位移位寄存器指令 |
SHRB DATA,S_BIT,N |
将DATA的值(位型)移入移位寄存器;S_BIT指定移位寄存器的**位,N指定移位寄存器的长度(正向移位=N,反向移位=-N) |
DATA,S_BIT:I,Q,M,SM,T,C,V,S,L N:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD,常数 |
用S7-200控制可双向运转的三相感应电动机
可逆电动机起动器电路一一适用于改变三相交流感应电动机旋转方向
这个示例程序用于控制可双向运转的三相感应电动机。
当与输入点I0.0相连的左转点动开关(Le)闭合时,电动机逆时针方向旋转,当与输入点I0.1相连的右转点动开关(Ri)闭合时,电动机顺时针方向旋转。但这要有一个前题,即与输入点I0.3相连的电动机电路断路器和与输入点I0.2相连的停机开关(OFF)都没有动作。只有按下停机开关,并等待5秒钟之后,才可以改变电动机的旋转方向。这样做是为了让电动机有足够的时问刹车停转,然后再反向起动,如果需要电动机反转的话。如
果与I0.0和I0.1相连的点动开关同时按下,电动机停转,并且小起动。

程序框图

程序和注释
在程序起始部分,程序检查是否必须激活互锁电路。互锁电路防比电动机误起动,或者按错误方向起动。只有当所有点动开关都没有动作(位于起始状态)或者等待时问溢出时,互锁才清除,即M2.0被置成逻辑0.
如果电动机断路器(输入点10.3)没有动作,停机点动开关(输入点10.2)也没有动作(这两个触点都是常闭触点);并且状态位M1门没有被设置成顺时针旋转标志,则使能位M 2.1被置为逻辑1。电动机才有可能逆时针旋转。代表逆时针旋转的状态位是M1.0。用类似方法可得到顺时针方向旋转的起动条件。
当点动起动开关(1e和Ri)这一动作,并且互锁位和状态位都没有被设置成相反的旋转方向时,电动止起动。即相关的输出位和状态位被置位,状态位的作用是使输出能够自保。电动止逆时针方向旋转起动器由输出点Q0.0控制。电动机顺时针方向旋转起动器由输出点Q0.1控制。
除此外,另有一组信号灯指示电动机当前的运行状态;逆时针方向旋转指示灯(Le)与输出点00.4相连;顺时针方向旋转指示灯(Ri)与输出点00.3相连;关电机指示灯(OFF)与输出点00.2相连。
当电动机被停机时,"ED”的下降沿将辅助存储位M 2.3置为1,进入停机模式。当M 2.3被置位时,限制电动机再次起动的定时器开始计时,该定时器的预置时问是5秒(500 X10ms),经过5秒钟后,内部存储器位M 2.3被复位。在这段强制等待时问内与输出点Q0.5相连的信号灯(Wait)闪烁。如果状态位都没有被置位,则点亮与输出点00.2相连的停止状态指示灯(OFF)。
该程序的长度为61个字。


PLC控制系统与电器控制系统的区别
PLC控制系统与电器控制系统相比,有许多相似之处,也有许多不同。不同之处主要在以下几个方面:
1)从控制方法上看,电器控制系统控制逻辑采用硬件接线,利用继电器机械触点的串联或并联等组合成控制逻辑,其连线多且复杂、体积大、功耗大,系统构成后,想再改变或增加功能较为困难。另外,继电器的触点数量有限,所以电器控制系统的灵活性和可扩展性受到很大限制。而PLC采用了计算机技术,其控制逻辑是以程序的方式存放在存储器中,要改变控制逻辑只需改变程序,因而很容易改变或增加系统功能。系统连线少、体积小、功耗小,而且PLC所谓“软继电器”实质上是存储器单元的状态,所以“软继电器”的触点数量是无限的,PLC系统的灵活性和可扩展性好。
2)从工作方式上看,在继电器控制电路中,当电源接通时,电路中所有继电器都处于受制约状态,即该吸合的继电器都同时吸合,不该吸合的继电器受某种条件限制而不能吸合,这种工作方式称为并行工作方式。而PLC的用户程序是按一定顺序循环执行,所以各软继电器都处于周期性循环扫描接通中,受同一条件制约的各个继电器的动作次序决定于程序扫描顺序,这种工作方式称为串行工作方式。
3)从控制速度上看,继电器控制系统依靠机械触点的动作以实现控制,工作频率低,机械触点还会出现抖动问题。而PLC通过程序指令控制半导体电路来实现控制的,速度快, 程序指令执行时间在微秒级,且不会出现触点抖动问题。
4)从定时和计数控制上看,电器控制系统采用时间继电器的延时动作进行时间控制,时间继电器的延时时间易受环境温度和温度变化的影响,定时精度不高。而PLC采用半导体集成电路作定时器,时钟脉冲由晶体振荡器产生,精度高,定时范围宽,用户可根据需要在程序中设定定时值,修改方便,不受环境的影响,且PLC具有计数功能,而电器控制系统一般不具备计数功能。
5)从可靠性和可维护性上看,由于电器控制系统使用了大量的机械触点,其存在机械磨损、电弧烧伤等,寿命短,系统的连线多,所以可靠性和可维护性较差。而PLC大量的开关动作由无触点的半导体电路来完成,其寿命长、可靠性高,PLC还具有自诊断功能,能查出自身的故障,随时显示给操作人员,并能动态地监视控制程序的执行情况,为现场调试和维护提供了方便。
传感器的电路连接方式(以NPN型传感器型为例)
传感器的输出方式不同,电路连接也有些差异,但输出方式相同的传感器的电路连接方式相同。在工程实际中使用的传感器通常分为直流两线式和直流三线式两种,其中光电传感器、电感式传感器、电容式传感器、光纤传感器均为直流三线式传感器,磁性传感器为直流两线式传感器。
下面介绍NPN型传感器的电路连接方式。

1.使用传感器的注意事项
1)传感器不宜安装在以下场所:阳光直射处、温度高、可能会结霜处、有腐蚀性气体处。
2)连接导线不要和电力线、动力线使用同一配线管或者配线槽,或者使用屏蔽线。
3)连接导线不能过细,长度不能过长。
4)接通电源后要等待一定时间才能进行检测。
2.传感器安装工艺要求
传感器安装方法正确,安装结束后要进行传感器的位置或灵敏度调节,使传感器能准确地检测到相应信号。
3.电路的安装工艺要求
1)连接导线选用正确。
2)电路各连接点连接可靠、牢固,外露铜丝**长不能超过2mm。
3)进接线排的导线都要编号,并套好号码管。
4)同一接线端子的连接导线**多不能超过2根。
4.安装工作的安全要求
在装配工作过程中,必须做到“安全**”,请认真阅读以下要求。
1)要正确使用一字或十字起子、尖嘴钳、剥线钳,防止在操作中发生起子或钳子伤手的事故;
2)安装结束确认接线正确无误后才能送电进行检测;
3)拆装要在停电状态下进行;
4)使用仪表带电测量时,一定要按照仪表使用的安全规程进行;
5)安装时,不用工具敲击安装器件,以防造成器材的损坏。
控制泵往复循环运行的S200 PLC梯形图程序
下面的PLC梯形图程序实现泵每五分钟工作一次,工作五分钟后,再停五分钟,循环往复运行。

图1 泵往复循环工作的PLC梯形图
图1是用S7-200编写的梯形图,图中用一个按钮做电机运行与停车开关(I 0.0)
动作原理:PLC通电运行的**个扫描周期,SM0.1=1,使M2.0=0电机不工作,按一下启动按钮I0.0,SR触发器翻转,M2.0=1,使电机上电运转。同时使T100上电,延时5分钟,T100吸合,其常闭点断开,使电机停转,T100的常开触点闭合,使T101上电开始延时,延时5分钟,T101吸合,其常闭触点断开,使T100断电,T100断电又使T101断电,T101断电其常闭点闭合,使电机又通电运行………………,如此这样电机运行5分钟停止5分钟循环运行。如果此时按一下I0.0,会使SR触发器翻转,使M2.0=0,电机停止工作。
西门子S7系列可编程控制器分为S7-400、S7-300、S7-200三个系列,分别为S7系列的大、中、小型可编程控制器系统。S7-200系列可编程控制器有CPU21X系列,CPU22X系列,其中CPU22X型可编程控制器提供了4个不同的基本型号,常见的有CPU221,CPU222,CPU224和CPU226四种基本型号。
小型PLC中,CPU221价格低廉能满足多种集成功能的需要。CPU 222是S7-200家族中低成本的单元,通过可连接的扩展模块即可处理模拟量。CPU 224具有更多的输入输出点及更大的存储器。CPU 226和226XM是功能**强的单元,可完全满足一些中小型复杂控制系统的要求。四种型号的PLC具有下列特点:
(1)集成的24V电源
可直接连接到传感器和变送器执行器,CPU 221和CPU222具有180mA 输出。CPU224输出280mA,CPU 226、CPU 226XM输出400mA 可用作负载电源。
(2)高速脉冲输出
具有2 路高速脉冲输出端,输出脉冲频率可达20KHz,用于控制步进电机或伺服电机,实现定位任务。
(3)通信口
CPU 221、CPU222和CPU224具有1个RS-485通信口。CPU 226、CPU 226XM具有2个RS-485通信口。支持PPI、MPI通信协议,有自由口通信能力。
(4)模拟电位器
CPU221/222有1个模拟电位器,CPU224/226/226XM有2个模拟电位器。模拟电位器用来改变特殊寄存器(SMB28,SMB29)中的数值,以改变程序运行时的参数。如定时器、计数器的预置值,过程量的控制参数。
(5)中断输入允许以极快的速度对过程信号的上升沿作出响应。
(6)EEPROM 存储器模块(选件)
可作为修改与拷贝程序的**工具,无需编程器并可进行辅助软件归档工作。
(7)电池模块
用户数据(如标志位状态、数据块、定时器、计数器)可通过内部的超级电容存储大约5 天。选用电池模块能延长存储时间到200天(10年寿命)。电池模块插在存储器模块的卡槽中。
(8)不同的设备类型
CPU 221~226 各有2种类型CPU,具有不同的电源电压和控制电压。
(9)数字量输入/输出点
CPU 221具有6个输入点和4个输出点;CPU 222具有8个输入点和6个输出点;CPU 224 具有14个输入点和10个输出点;CPU226/226XM 具有24个输入点和16个输出点。CPU22X主机的输入点为24V直流双向光电耦合输入电路,输出有继电器和直流(MOS型)两种类型。
(10)高速计数器
CPU 221/222有4个30KHz高速计数器,CPU224/226/226XM有6
PLC的应用分类介绍
目前,PLC在国内外已广泛应用于钢铁、石油、化工、电力、建材、机械制造、汽车、轻纺、交通运输、环保及文化娱乐等各个行业,随着其性能价格比的不断提高,应用的范围还在不断扩大,PLC的应用大致可归纳为以下几类。
1)、开关量的逻辑控制
这是PLC**基本、**广泛的应用领域。PLC的逻辑控制取代传统的继电系统控制电路,实现逻辑控制、顺序控制,既可用于单机控制,也可用于多机群控及自动化生产线的控制等。如机床电气控制、装配生产线、电梯控制、冶金系统的高炉上料系统以及各种生产线的控制。
2)、运动控制
PLC可以用于圆周运动或直线运动的控制。目前,大多数的PLC制造商都提供拖动步进电机或伺服电机的单轴或多轴位置控制模块,这一功能可广泛用于各种机械,如金属切削机床、金属成型机床、机器人、电梯等。
3)、过程控制
过程控制是指对温度、压力、流量、速度等连续变化的模拟量的闭环控制。PLC采用相应的A/D和D/A转换模块及各种各样的控制算法程序来处理模拟量,完成闭环控制。PID调节是一般闭环控制系统中用得较多的一种调节方法。过程控制在冶金、化工、热处理、锅炉控制等场合有非常广泛的应用。现代的大、中型PLC一般都有闭环PID控制模块,这一功能可以用PID子程序来实现,而更多的是使用专用PID模块来实现。
4)、数据处理
PLC具有数学运算(含矩阵运算、函数运算、逻辑运算)、数据传送、数据转换、排序、查表、位操作等功能,可以完成数据的采集、分析及处理。这些数据可以通过通信接口传送到指定的智能装置进行处理,或将它们打印备用。数据处理一般用于大型控制系统,如造纸、冶金、食品工业中的一些大型控制系统。
5)、通信及联网
PLC通信括PLC相互之间、PLC与上位机、PLC与其它智能设备间的通信。PLC与其它智能控制设备一起,可以构成“集中管理、分散控制”的分布式控制系统,满足工厂自动化系统发展的需要。
● PLC控制系统与继电器控制系统的区别 :
⑴ 组成器件不同:继电器控制线路是许多真正的硬件继电器组成,而梯形图则由许多所谓“软继电器”组成。
⑵ 触点数量不同:硬继电器的触点数量有限,用于控制的继电器的触 点数一般只有4~8对;而梯形图中每个“软继电器”供编程使用的触点数有无限对。
⑶ 实施控制的方法不同:在继电器控制线路中,实现某种控制是通过各种继电器之间硬接线解决的。而PLC控制是通过梯形图即软件编 程解决的。
⑷ 工作方式不同:在继电器控制线路中,采用并行工作方式;而在梯形图的控制线路中,采用串行工作方式。
PLC的编程技巧及实例分析
利用PLC进行程序编制时,为了减少指令条数,节省内存和提高运行速度,应掌握以下编程技巧。
(1)把串联触点多的电路编在上方,如图8-4所示,可见(b)形式减少使用ORB指令或多重输出指令等。
(2)并联触点多的电路放在左边,如图8-5所示,可见(b)形式减少使用ANB指令。
(3)多重输出电路,**将串联接点多的电路放在下边,如图8-6所示,可以不使用MPS、MPP指令等。
(4)如果电路复杂,采用ANB、ORB等指令实现比较困难时,可以重复使用一些触点改成等效电路,再进行编程,如图8-7所示。

