品牌:西门子
起订:1台
供应:9999台
发货:1天内
信息标签:6SL3320-1TE41-2AA3,供应,电子、电工,工控系统及装备
点击这里进行电话呼叫
点击这里QQ咨询
联系时一定要说在【贸易商务资源网】看到的将给您优惠!如果您也想和该公司一样在网站发信息有好排名,点击立即免费注册,发布产品推广。
6SL3320-1TE41-2AA3 6SL3320-1TE41-2AA3
西门子一级授权代理商|中国西门子有限公司西门子一级授权代理商|中国西门子有限公司西门子一级授权代理商|中国西门子有限公司西门子一级授权代理商|中国西门子有限公司
西门子交流电源代理商德国西门子股份公司创立于1847年,是全球电子电气工程领域的引领企业。西门子自1872年进入中国,140余年来以创新的技术、卓越的解决方案和产品坚持不懈地对中国的发展提供全面支持,并以出众的品质和令人信赖的可靠性、引领的技术成就、不懈的创新追求,确立了在中国市场的引领地位。2014年(2013年10月1日至2014年9月30日),西门子在中国的总营收达到64.4亿欧元,拥有超过32000名员工。西门子已经发展成为中国社会和经济不可分割的一部分,并竭诚与中国携手合作,共同致力于实现可持续发展。
西门子授权一级代理商 西门子授权总代理商 西门子PLC授权代理商 西门子变频器授权代理商 西门子授权电缆代理商 西门子授权伺服系统代理商
凡在公司采购西门子产品,均可质保一年,假一罚十
上海隆彦自动化科技有限公司
 联系人:李经理
联系人:李经理
全国统一咨询热线 :15800846971 工作邮箱:3192212451@qq.com
:15800846971 工作邮箱:3192212451@qq.com
 咨询QQ:3192212451 咨询:021-3192212451
咨询QQ:3192212451 咨询:021-3192212451
西门子中国授权代理

西门子代理商总代理一级代理商 西门子代理商总代理一级代理商
全国统一咨询热线:15800846971 工作邮箱:3192212451@qq.com
西门子一级代理商,西门子PLC代理商,西门子变频器代理商,西门子人机界面代理商,西门子开关电源代理商,西门子软启动器代理商,西门子伺服电机代理商,西门子通讯电缆代理商,西门子仪器仪表代理商,西门子阀门定位器代理商,西门子触摸屏代理商,西门子数控系统代理商,西门子DP接头代理商,西门子DP总线电缆代理商西门子代理商西门子PLC代理商西门子CPU代理商西门子人机界面代理商西们子开关电源代理商西门子通讯电缆代理商西门子仪器仪表代理商西门子阀门定位器代理商西门子数控系统代理商西门子DP总线电缆代理商西门子中国总代理西门子中国PLC总代理西门子中国工业自动化与驱动技术产品总代理西门子中国工业业务领域总代理西门子授权指定维修部
西门子代理商-上海赞国,库存大量西门子PLC,产品种类、型号齐全,涵盖了西门子200系列PLC、西门子300系列PLC及其EM221模块、EM222模块、EM223模块、EM231模块、EM232模块、EM235模块、PPI电缆、MPI电缆、5611卡、SM321、SM322、SM323、SM331、EM332模块等,S7-200系列主机包括CPU224CN、CPU226CN、CPU224XP,S7-300系列主机包括CPU312、CPU313、CPU314、CPU315-2DP等,价格低,交货速度快。
西门子变频器总代理 西门子数字量模块,西门子模拟量模块,西门子开关量模块,西门子扩展模块,西门子AI,AO,DI,DO,IO模块西门子触摸屏,西门子变频器,西门子总线电缆,西门子DP接头,西门子数控主板,西门子电机,等西门子工控系列产品,全新原装,现货销售,价格优惠,欢迎来电咨询!


1910年:西门子创建西门子中国电气工程公司,总部位于柏林,分支机构设在上海。在接下来的四年中,西门子将业务扩展到北京、广州、武汉、哈尔滨、香港、青岛和天津。1914年,公司更名为西门子中国公司(上海)。西门子的在华业务,尤其是电力领域的业务,在20世纪初发展迅速。西门子扩建了北京近郊的石景山发电厂。
代理销售西门子
 :15800846971 工作邮箱:3192212451@qq.com
:15800846971 工作邮箱:3192212451@qq.com

西门子代理商总代理一级代理商 西门子代理商总代理一级代理商
6SL3320-1TE41-2AA3
PLC编程指令——符合检查指令(COIN)
此指令用来检查参考值与比较值是否一致,可用于检查刀库、转台等旋转体是否到达目标位置等。功能指令格式如图1所示。
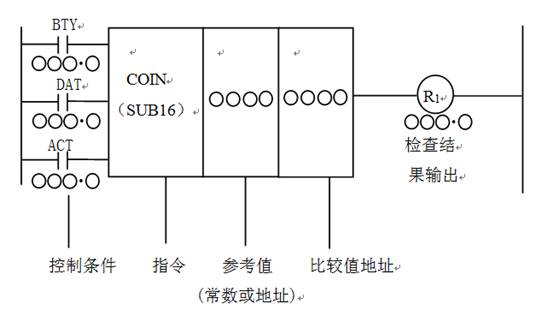
图1 COIN指令格式
控制条件说明:
1)指定数据位数 BYT=0,处理数据为两位BCD码;BYT=1,处理数据为4位BCD码。
2)指定参考值格式 DAT=0,参考值用常数指定;DAT=1,指定存放参考值的数据地址。
注;也有另一种格式把DAT条件放到指令方格后的参数1中,则条件少一行,而参数多一格。
3)执行命令 ACT=0,不执行;ACT=1,执行COIN指令。
4)比较结果 R1=0,参考值≠比较值;R1=1,参考值=比较值
S7-300是模块化小型PLC系统,能满足中等性能要求的应用。各种单独的模块之间可进行广泛组合构成不同要求的系统。与S7-200 PLC比较,S7-300 PLC采用模块化结构,具备高速(0.6~0.1μs)的指令运算速度;用浮点数运算比较有效地实现了更为复杂的算术运算;一个带标准用户接口的软件工具方便用户给所有模块进行参数赋值;方便的人机界面服务已经集成在S7-300操作系统内,人机对话的编程要求大大减少。SIMATIC人机界面(HMI)从S7-300中取得数据,S7-300按用户指定的刷新速度传送这些数据。S7-300操作系统自动地处理数据的传送;CPU的智能化的诊断系统连续监控系统的功能是否正常、记录错误和特殊系统事件(例如:超时,模块更换,等等);多级口令保护可以使用户高度、有效地保护其技术机密,防止未经允许的复制和修改;S7-300 PLC设有操作方式选择开关,操作方式选择开关像钥匙一样可以拔出,当钥匙拔出时,就不能改变操作方式,这样就可防止非法删除或改写用户程序。具备强大的通信功能,S7-300 PLC可通过编程软件Step 7的用户界面提供通信组态功能,这使得组态非常容易、简单。S7-300 PLC具有多种不同的通信接口,并通过多种通信处理器来连接AS-I总线接口和工业以太网总线系统;串行通信处理器用来连接点到点的通信系统;多点接口(MPI)集成在CPU中,用于同时连接编程器、PC机、人机界面系统及其他SIMATIC S7/M7/C7等自动化控制系统。
一个声控开关控制的照明灯控制程序的梯形图举例
试设计一个照明灯的控制程序。当接在I0.0上的声控开关感应到声音信号后,接在Q0.0上的照明灯可发光30S。如果在这段时间内声控开关又感应到声音信号,则时间间隔从头开始。这样可确保**后一次感应到声音信号后,灯光可维持30S的照明。
答案:参考梯形图
![)X[NOJDZC)2O3YFO]FTJ%%K](http://www.plc100.com/prog/tixingtu/shengkongdeng.files/image001.jpg)
1)周期可调的脉冲信号发生器
如图5-6所示采用定时器T0产生一个周期可调节的连续脉冲。当X0常开触点闭合后,**次扫描到T0常闭触点时,它是闭合的,于是T0线圈得电,经过1s的延时,T0常闭触点断开。T0常闭触点断开后的下一个扫描周期中,当扫描到T0常闭触点时,因它已断开,使T0线圈失电,T0常闭触点又随之恢复闭合。这样,在下一个扫描周期扫描到T0常闭触点时,又使T0线圈得电,重复以上动作,T0的常开触点连续闭合、断开,就产生了脉宽为一个扫描周期、脉冲周期为1s的连续脉冲。改变T0的设定值,就可改变脉冲周期。
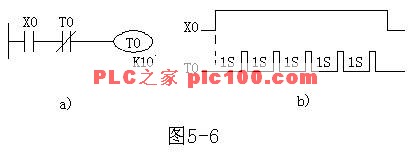
图5-6 周期可调的脉冲信号发生器
a)梯形图 b)时序图
(2)占空比可调的脉冲信号发生器
如图5-7所示为采用两个定时器产生连续脉冲信号,脉冲周期为5秒,占空比为3:2(接通时间:断开时间)。接通时间3s,由定时器T1设定,断开时间为2s,由定时器T0设定,用Y0作为连续脉冲输出端。
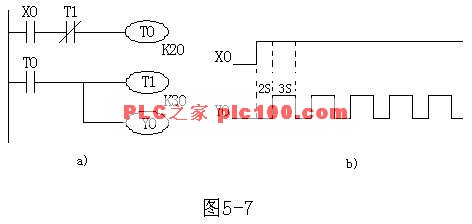
图5-7 占空比可调的脉冲信号发生器
a)梯形图 b)时序图
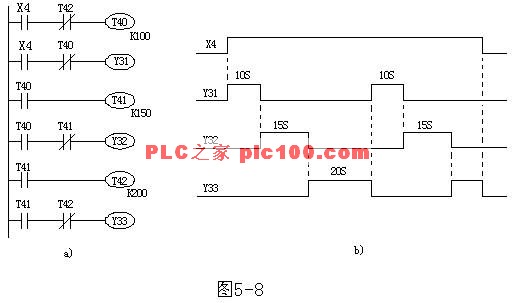
(3)顺序脉冲发生器
如图5-8a所示为用三个定时器产生一组顺序脉冲的梯形图程序,顺序脉冲波形如图5-8b所示。当X4接通,T40开始延时,同时Y31通电,定时l0s时间到,T40常闭触点断开,Y31断电。T40常开触点闭合,T41开始延时,同时Y32通电,当T41定时15s时间到,Y32断电。T41常开触点闭合,T42开始延时.同时Y33通电,T42定时20s时间到,Y33断电。如果X4仍接通,重新开始产生顺序脉冲,直至X4断开。当X4断开时,所有的定时器全部断电,定时器触点复位,输出Y31、Y32及Y33全部断电。
西门子PLC s7立即触点和立即输出指令的应用
立即触点指令(Immediate)只能用于输入量I,执行立即触点指令时,立即读入物理输入点的值,根据该值决定触点的接通/断开状态,但是并不更新该物理输入点对应的输入过程映像寄存器。在语句表中,分别用LDI、AI、OI来表示开始、串联和并联的常开立即触点,用LDNI、ANI、ONI来表示开始、串联和并联的常闭立即触点。触点符号中间的“I”和“/I”用来表示立即常开触点和立即常闭触点。
立即触点和立即输出指令的应用


串联电路块的并联连接指令OLD
两个或两个以上的接点串联连接的电路叫串联电路块。串联电路块并联连接时,分支开始用LD、LDN指令,分支结束用OLD指令。OLD指令与后述的ALD指令均为无目标元件指令,而两条无目标元件指令的步长都为一个程序步。OLD有时也简称或块指令。
2、并联电路的串联连接指令ALD
两个或两个以上接点并联电路称为并联电路块,分支电路并联电路块与前面电路串联连接时,使用ALD指令。分支的起点用LD、LDN指令,并联电路结束后,使用ALD指令与前面电路串联。ALD指令也简称与块指令,ALD也是无操作目标元件,是一个程序步指令。
3、输出指令 =
1、= 输出指令是将继电器、定时器、计数器等的线圈与梯形图右边的母线直接连接,线圈的右边不允许有触点,在编程中,触点以重复使用,且类型和数量不受限制。
4、置位与复位指令S、R
S为置位指令,使动作保持;R为复位指令,使操作保持复位。从指定的位置开始的N个点的寄存器都被置位或复位,N=1~255如果被指定复位的是定时器位或计数器位,将清除定时器或计数器的当前值。
5、跳变触点EU,ED
正跳变触点检测到一次正跳变(触点的入信号由0到1)时,或负跳变触点检测到一次负跳变(触点的入信号由1到0)时,触点接通到一个扫描周期.正/负跳变的符号为EU和ED,他们没有操作数,触点符号中间的”P”和”N”分别表示正跳变和负跳变
6、空操作指令NOP
NOP指令是一条无动作、无目标元件的一个序步指令。空操作指令使该步序为空操作。用NOP指令可替代已写入指令,可以改变电路。在程序中加入NOP指令,在改动或追加程序时可以减少步序号的改变。
7、程序结束指令END
END是一条无目标元件的一序步指令。PLC反复进行输入处理、程序运算、输出处理,在程序的**后写入END指令,表示程序结束,直接进行输出处理。在程序调试过程中,可以按段插入END指令,可以按顺序扩大对各程序段动作的检查。采用END指令将程序划分为若干段,在确认处于前面电路块的动作正确无误之后,依次删去END指令。要注意的是在执行END指令时,也刷新监视时钟。
PLC的自动检测功能及故障诊断
PLC具有很完善的自诊断功能,如出现故障,借助自诊断程序可以方便的找到出现故障的部件,更换后就可以恢复正常工作。故障处理的方法可参看PLC系统手册的故障处理指南。实践证明,外部设备的故障率远高于PLC,而这些设备故障时,PLC不会自动停机,可使故障范围扩大。为了及时发现故障,可用梯形图程序实现故障的自诊断和自处理。
1. 超时检测
机械设备在各工步的所需的时间基本不变,因此可以用时间为参考,在可编程控制器发出信号,相应的外部执行机构开始动作时起动一个定时器开始定计时,定时器的设定值比正常情况下该动作的持续时间长20%左右。如某执行机构在正常情况下运行10s后,使限位开关动作,发出动作结束的信号。在该执行机构开始动作时起动设定值为12s的定时器定时,若12s后还没有收到动作结束的信号,由定时器的常开触点发出故障信号,该信号停止正常的程序,起动报警和故障显示程序,使操作人员和维修人员能迅速判别故障的种类,及时采取排除故障的措施。
2. 逻辑错误检查
在系统正常运行时,PLC的输入、输出信号和内部的信号(如存储器为的状态)相互之间存在着确定的关系,如出现异常的逻辑信号,则说明出了故障。因此可以编制一些常见故障的异常逻辑关系,一旦异常逻辑关系为ON状态,就应按故障处理。如机械运动过程中先后有两个限位开关动作,这两个信号不会同时接通。若它们同时接通,说明至少有一个限位开关被卡死,应停机进行处理。在梯形图中,用这两个限位开关对应的存储器的位的常开触点串联,来驱动一个表示限位开关故障的存储器的位就可以进行检测。
PLC在安装和维护时应注意的问题
2.1 PLC的安装
PLC适用于大多数工业现场,但它对使用场合、环境温度等还是有一定要求。控制PLC的工作环境,可以有效地提高它的工作效率和寿命。在安装PLC时,要避开下列场所:
(1)环境温度超过0 ~ 50℃的范围;
(2)相对湿度超过85%或者存在露水凝聚(由温度突变或其他因素所引起的);
(3)太阳光直接照射;
(4)有腐蚀和易燃的气体,例如氯化氢、硫化氢等;
(5)有打量铁屑及灰尘;
(6)频繁或连续的振动,振动频率为10 ~ 55Hz、幅度为0.5mm(峰-峰);
(7)超过10g(重力加速度)的冲击。
小型可编程控制器外壳的4个角上,均有安装孔。有两种安装方法,一是用螺钉固定,不同的单元有不同的安装尺寸;另一种是DIN(德国共和标准)轨道固定。DIN轨道配套使用的安装夹板,左右各一对。在轨道上,先装好左右夹板,装上PLC,然后拧紧螺钉。为了使控制系统工作可*,通常把可编程控制器安装在有保护外壳的控制柜中,以防止灰尘、油污、水溅。为了保证可编程控制器在工作状态下其温度保持在规定环境温度范围内,安装机器应有足够的通风空间,基本单元和扩展单元之间要有30mm以上间隔。如果周围环境超过55C,要安装电风扇,强迫通风。
为了避免其他外围设备的电干扰,可编程控制器应尽可能远离高压电源线和高压设备,可编程控制器与高压设备和电源线之间应留出至少200mm的距离。
当可编程控制器垂直安装时,要严防导线头、铁屑等从通风窗掉入可编程控制器内部,造成印刷电路板短路,使其不能正常工作甚至**损坏。
2.2 电源接线
PLC供电电源为50Hz、220V±10%的交流电。
FX系列可编程控制器有直流24V输出接线端。该接线端可为输入传感(如光电开关或接近开关)提供直流24V电源。
如果电源发生故障,中断时间少于10ms,PLC工作不受影响。若电源中断超过10ms或电源下降超过允许值,则PLC停止工作,所有的输出点均同时断开。当电源恢复时,若RUN输入接通,则操作自动进行。
对于电源线来的干扰,PLC本身具有足够的抵制能力。如果电源干扰特别严重,可以安装一个变比为1:1的隔离变压器,以减少设备与地之间的干扰。
2.3 接地
良好的接地是保证PLC可*工作的重要条件,可以避免偶然发生的电压冲击危害。接地线与机器的接地端相接,基本单元接地。如果要用扩展单元,其接地点应与基本单元的接地点接在一起。为了抑制加在电源及输入端、输出端的干扰,应给可编程控制器接上专用地线,接地点应与动力设备(如电机)的接地点分开。若达不到这种要求,也必须做到与其他设备公共接地,禁止与其他设备串联接地。接地点应尽可能*近PLC。
2.4 直流24V接线端
使用无源触点的输入器件时,PLC内部24V电源通过输入器件向输入端提供每点7mA的电流。
PLC上的24V接线端子,还可以向外部传感器(如接近开关或光电开关)提供电流。24V端子作传感器电源时,COM端子是直流24V地端。如果采用扩展船员,则应将基本单元和扩展单元的24V端连接起来。另外,任何外部电源不能接到这个端子。
如果发生过载现象,电压将自动跌落,该点输入对可编程控制器不起作用。
每种型号的PLC的输入点数量是有规定的。对每一个尚未使用的输入点,它不耗电,因此在这种情况下,24V电源端子向外供电流的能力可以增加。
FX系列PLC的空位端子,在任何情况下都不能使用。
2.5 输入接线
PLC一般接受行程开关、限位开关等输入的开关量信号。输入接线端子是PLC与外部传感器负载转换信号的端口。输入接线,一般指外部传感器与输入端口的接线。
输入器件可以是任何无源的触点或集电极开路的NPN管。输入器件接通时,输入端接通,输入线路闭合,同时输入指示的发光二极管亮。
输入端的一次电路与二次电路之间,采用光电耦合隔离。二次电路带RC滤波器,以防止由于输入触点抖动或从输入线路串入的电噪声引起PLC误动作。
若在输入触点电路串联二极管,在串联二极管上的电压应小于4V。若使用带发光二极管的舌簧开关,串联二极管的数目不能超过两只。
另外,输入接线还应特别注意以下几点:
(1)输入接线一般不要超过30m。但如果环境干扰较小,电压降不大时,输入接线可适当长些。
(2)输入、输出线不能用同一根电缆,输入、输出线要分开。
(3)可编程控制器所能接受的脉冲信号的宽度,应大于扫描周期的时间。
2.6 输出接线
(1)可编程控制器有继电器输出、晶闸管输出、晶体管输出3种形式。
(2)输出端接线分为独立输出和公共输出。当PLC的输出继电器或晶闸管动作时,同一号码的两个输出端接通。在不同组中,可采用不同类型和电压等级的输出电压。但在同一组中的输出只能用同一类型、同一电压等级的电源。
(3)由于PLC的输出元件被封装在印制电路板上,并且连接至端子板,若将连接输出元件的负载短路,将烧毁印制电路板,因此,应用熔丝保护输出元件。
(4)采用继电器输出时,承受的电感性负载大小影响到继电器的工作寿命,因此继电器工作寿命要求长。
(5)PLC的输出负载可能产生噪声干扰,因此要采取措施加以控制。
此外,对于能使用户造成伤害的危险负载,除了在控制程序中加以考虑之外,还应设计外部紧急停车电路,使得可编程控制器发生故障时,能将引起伤害的负载电源切断。
交流输出线和直流输出线不要用同一本电缆,输出线应尽量远离高压线和动力线,避免并行。
西门子S7-200网络的通讯设置和元件选择
S7-200的端口是不隔离的,如果想使网络隔离,应考虑使用RS-485中继器或者EM277。
注意:
●具有不同电位的互联设备有可能导致不希望的电流流过连接电缆。
●这种不希望的电流可能导致通讯失败或者设备损坏。
●要确保用通讯电缆连接的所有设备有相同的参考电位,或者彼此隔离,来避免产生这种不希望的电流。
为网络确定通讯距离、通讯速率和电缆类型
网段的**长度取决于两个因素:隔离(用RS-485中继器)和波特率。但连接具有不同电位的设备是需要隔离。当接地点之间的距离很远时,有可能具有不同的地电位。即使距离较近,大型机械的负载电流也能导致地电位的不同。
表1 网络电缆的**长度
|
波特率 |
非隔离CPU口1 |
有中继器的CPU口或者EM277 |
|
9.6K到187.5K |
50m |
1000m |
|
500k |
不支持 |
400m |
|
1M到1.5M |
不支持 |
200m |
|
3M到12M |
不支持 |
100m |
1 如果不是用隔离端和中继器,允许的**距离为50m。测量该距离时,从网段的**个节点开始。到网段的**后一个节点。
在网络中使用中继器
RS-485中继器为网段提供偏压电阻和终端电阻。目的是为了:
●增加网络的长度:在网络中使用一个中继器可以使网络的通讯距离扩展50m。如果使用两个中继器而且中间没有其他节点,网络的通讯距离按照所使用的波特率扩展一个网段的长度。在一个串联网络中,**多可以使用9个中继器。但网络的长度不能超过9600m.
●为网络增加设备:在9600的波特率下。50米距离之内,一个网段**多可以连接32个设备,使用一个中继器允许在网络上增加32个设备。
●在不同的网段之间电隔离:如果不同的网段具有不同的地电位,将他们隔离会提高网络的通讯质量。
一个中继器在网络中被算作网段的一个节点,但没有被指定站地址。

图1带有中继器的网络
选择网络电缆
S7-200 网络使用RS-485标准,是用双绞线电缆。在一个网段上可以连接32个设备。
表2 网络电缆的通用指标
|
技术指标 |
描述 |
|
电缆类型 |
屏蔽双绞线 |
|
回路阻抗 |
≤115Ω/Km |
|
有效电容 |
30pF/m |
|
标称阻抗 |
大约135Ω-160Ω(频率=3MHz-20MHz) |
|
衰减 |
0.9Db/100m(频率=200KHz) |
|
导线截面积 |
0.3mm2-0.5mm2 |
利用定时器与计数器设计一PLC控制的长延时电路
利用定时器与计数器设计一PLC控制的长延时电路(1000秒)。

如图1所示为定时器与计数器控制的梯形图。
图中,X001是定时器的定时条件,当条件满足时,定时器T1开始定时,10秒后定时器线圈输出,同时定时器T1复位、计数器C1开始计数一次。利用定时器的常闭触点,使定时器T1每隔10秒产生一个计数脉冲,当计满100次后,计数器C1线圈输出,将输出继电器Y000置“1”。X002为计数器C1的复位条件。只要复位条件满足,不管计数是否计满,随时都可以使计数器复位,体现复位优先原则。
程序清单:
LD X001
ANI T1
OUT T1
K 100
LD T1
OUT C1
K 100
LD C1
OUT Y000
LD X002
RST C1
END
如图1所示是二分频电路的梯形图和时序图。
待分频的脉冲信号加在X000端,设M101和Y000的初始状态为“0”。当**个脉冲信号的上升沿到来时,M101产生一个单脉冲(如图所示),Y000被置“1”,当M101置“0”时,Y000仍保持置“1”;当第二个脉冲信号的上升沿到来时,M101又产生一个单脉冲(如图所示),M101常闭触点断开,使Y000由“1”变“0”,当M101置“0”时,Y000仍保持置“0”直到第三个脉冲到来。当第三个脉冲到来时,重复上述过程。由此可见,X000每送两个脉冲,Y000产生一个脉冲,完成对输入信号的二分频。
程序清单:
LD X000
PLS M101
LD M101
ANI Y000
LDI M101
AND Y000
OUT Y000
END

图1 分频电路梯形图及时序图
PLC的三大应用领域简介——开关逻辑和顺序、过程控制、运动控制
(1) 开关逻辑和顺序控制:这是可编程序控制器**基本的控制功能,在工业场合应用**广泛,可代替继电器控制系统。开关量逻辑控制不但能用于单台设备,而且可用于生产线上。
(2) 过程控制:PLC通过模拟量I/O模块,可对温度、流量、压力等连续变化的模拟量进行控制。大中型PLC都具有PID闭环控制功能并已广泛地用于电力、化工、机械、冶金等行业。
(3) 运动控制:PLC可应用于对直线运动或圆周运动的控制,如数控机床、机器人、金属加工、电梯控制等。
1 引言
可编程序控制器是以微处理器为基础,综合计算机、通信、联网以及自动控制技术而开发的新一代工业控制装置。可编程序控制器在我国的发展与应用已有30多年的历史,现在它已经广泛应用于国民经济的各个工业生产领域,成为提高传统工业装备水平和技术能力的重要设备和强大支柱。随着全球一体化经济的发展,努力发展可编程序控制器在我国的大规模应用,形成具有自主知识产权的可编程序控制器技术,应该是广大技术人员努力的方向。
2 可编程序控制器的发展历程
可编程序控制器问世于 20 世纪 60 年代,当时的可编程序控制器功能都很简单,只有逻辑、定时、计数等功能;硬件方面用于可编程序控制器的集成电路还没有投入大规模工业化生产, CPU 以分立元件组成;存储器为磁心存储器,存储容量有限;用户指令一般只有二三十条,还没有成型的编程语言;机型单一,没有形成系列。一台可编程序控制器**多只能替代200~300个继电器组成的控制系统,在体积方面,与现在的可编程序控制器相比,可以说是庞然大物。
进入70年代,随着中小规模集成电路的工业化生产,可编程序控制器技术得到了较大的发展。可编程序控制器功能除逻辑运算外,增加了数值运算、计算机接口、模拟量控制等;软件开发有自诊断程序,程序存储开始使用EPROM ;可靠性进一步提高,初步形成系列,结构上开始有模块式和整体式的区分,整机功能从专用向通用过渡。
70年代后期和80年代初期,微处理器技术日趋成熟,单片微处理器、半导体存储器进入工业化生产,大规模集成电路开始普遍应用。可编程序控制器开始向多处理器发展,使可编程序控制器的功能和处理速度大为增强,并具有通信和远程 I/O 能力,增加了多种特殊功能,如浮点运算、三角函数、查表、列表等,自诊断和容错技术也迅速发展。
80年代后期到90年代中期,随着计算机和网络技术的普及应用,超大规模集成电路、门阵列以及专用集成电路的迅速发展,可编程序控制器的CPU已发展为由16位或32位微处理器构成,处理速度得到很大提高,高速计数、中断、PID、运动控制等功能引入了可编程序控制器。使得可编程序控制器能够满足工业生产过程的各个领域,可编程序控制器已完全取代了传统的逻辑控制装置,模拟量仪表控制装置和以小型机为核心的DDC(直接数字控制)控制装置。由于联网能力增强,既可和上位计算机联网,也可以下挂 FLEX I/O 或远程 I/O ,从而组成分布式控制系统(DCS)已无困难。梯型图语言和语句表语言完全成熟,基本上标准化,SFC(顺序功能图)语言逐步普及,专用的编程器已被个人计算机和相应编程软件所替代,人机界面装置日趋完善,已能进行对整个工厂的监控、管理,并发展了冗余技术,大大加强了可靠性。
进入21世纪,可编程序控制器仍保持旺盛的发展势头,并不断扩大其应用领域,如为用户配置柔性制造系统(FMS)和计算机集成制造系统(CIMS)。目前可编程序控制器主要向两 个方向扩展:一是综合化控制系统,它已经突破了原有的可编程序控制器的概念,将工厂生产过程控制与信息管理系统密切结合起来,甚至向上为MES和ERP系统准备了技术基础,这种发展趋势会使得举步为艰的ERP系统有了坚实的技术基础,从而会带来工业控制的一场变革,实现真正意义上的电子信息化工厂;二是微型可编程序控制器异军突起,体积如手掌大小,功能可覆盖单体设备及整个车间的控制功能,并具备联网功能,这种微型化的可编程序控制器使得控制系统可将触角延伸到工厂的各个角落。随着**经济一体化进程的加快,在技术发展的同时,发达国家更加注重了对可编程序控制器的知识产权的保护,国际大型可编程序控制器制造商纷纷加入了可编程序控制器的国际标准化组织,他们利用许多技术标准建立了符合他们经济利益的技术保护壁垒。
3 可编程序控制器在我国的发展
我国可编程序控制器的发展与国际上的发展有所不同,国际上可编程序控制器的发展是从研制、开发、生产到应用,而我国则是从成套设备引进、可编程序控制器引进应用、消化移植、合资生产到广泛应用。大致可划分为下述三个阶段:
(1) 可编程序控制器的初级认识阶段(70 年代后期到 80 年代初期)
国际上可编程序控制器的发展,首先引起了国内工程技术界的极大兴趣,所以我国对可编程序控制器的认识始于 70 年代后期到 80 年代初期的成套设备引进中,当时的上海宝钢一期工程中有多项工程引进了十几种机型约 200 多台可编程序控制器。这些可编程序控制器用于原料码头到高炉、轧钢、钢管等整个钢铁冶炼以及加工生产线上,取代了传统的继电器逻辑系统,并部分取代了模拟量控制和小型 DDC 系统。继宝钢一期工程后,国内许多厂家陆续引进的设备和生产线大都配备了可编程序控制器,其应用范围包括电站、石油化工、汽车制造、港口和码头等各领域。正是在成套设备引进过程中,我们打开了眼界,了解认识了可编程序控制器,这也促进了可编程序控制器在我国的发展。
(2) 可编程序控制器的引进应用和消化移植阶段(80 年代初期到90年代初期)
80年代初期开始,随着我国改革开放的不断深入,在成套设备引进的同时,国外原装的可编程序控制器开始涌入国内市场。许多部门和单位相继引进可编程序控制器并自己设计组成控制系统,其应用范围也扩大到建材、轻工、煤炭、水处理、食品、制药、造纸、橡胶和精细化工等工业领域。
随着应用能力的提高和市场需求的扩大,一些部门和单位本着技贸结合、消化移植的方针,一方面进行二次开发和应用研究,一方面也在引进可编程序控制器的生产线,建立生产可编程序控制器的合资企业,积极开发自己的产品。
同时,国内也开始研制可编程序控制器产品,当时在上海、北京、西安、广州、长春等地有约 20 多家科研单位、大专院校和工厂都在研制和生产可编程序控制器,但由于缺乏资金和后续研究力量、生产技术相对落后,只能停留在实验室阶段,没能投入实际应用和形成工业化生产。
(3) 可编程序控制器的广泛发展阶段(90 年代初期到现在)
进入90年代,我国的可编程序控制器进入了广泛发展阶段,主要表现在以下几个方面:
a. 政府重视
可编程序控制器的发展得到了政府的高度重视,在当时机械电子工业部的领导下,于 1991 年成立了可编程序控制器行业协会。可编程序控制器行业协会在政府和企事业之间起到了桥梁作用,沟通了情况,为做出决策提供了依据。同时可编程序控制器的标准化工作也受到了有关部门的重视,于 1993 年成立了可编程序控制器标准化技术委员会,为我国可编程序控制器的进一步发展打下了基础。
b. 应用更加广泛
这一阶段可编程序控制器的应用已经渗透到国民经济的各个部门和工业过程的各个角落,已成为企业提高装备技术水平的重要标志。在宝钢的二期三期工程中使用了国外多个厂家三十几种机型计六百多台套的可编程序控制器,在广西玉柴机器有限公司的柴油机生产线中使用了近二百台罗克韦尔自动化公司的可编程序控制器,像这样大范围使用可编程序控制器的系统已很常见。在这一阶段中,我国的工程技术人员充分显示出了设计应用、软件制作、设备成套的能力。**近,在笔者自行设计成套、软件开发、安装调试的我国西部大开发重点项目青海盐湖100万吨氯化钾项目中,采用可编程序控制器组成了全厂的自动化控制系统,并将可编程序控制器设计在MCC柜中,实现了全厂六百多面MCC柜、覆盖全厂各个工艺流程的综合自动化系统。该应用项目已引起国外各大公司的注意,罗克韦尔自动化公司邀请项目设计人员去美国公司总部进行介绍。
c. 研制、开发、生产取得成果
随着我国改革开放的不断深入,国外厂商纷纷看好中国的市场,在中国建立他们的办事处,甚至将他们的亚太总部设在中国。国内企业纷纷引进国外技术,从而促进了一批技术引进企业、合资企业的建立,带动了我国可编程序控制器行业的技术发展。可喜的是从90年代初期开始,由于可编程序控制器应用的不断深入,国内又掀起了自主研制开发可编程序控制器的高潮,虽然多为小型可编程序控制器,批量亦不大,但其功能、质量和可靠性已有明显的提高,代表产品如南京嘉华的JH200,I/O为12到120点,有高速计数器和模拟量功能;杭州新箭公司的D20P,其I/O为12/8点,D100的I/O可从40点扩展到120点;兰州全志的RD100、RD200,前者I/O为9/4点,2点模入,后者I/O为20~40点,扩展的功能有编码盘测速,热电偶测温和模拟量I/O,能联网32台RD200以及与PC机进行实时通信。同时,中大规模的可编程序控制器在国内也开始出现,交通部上海船舶运输研究所的STI2000,I/O为256点,多台联网时I/O可达4096点;北京和利时公司研制生产的Hollias-PLC 可编程序控制器,其中典型的产品为数字量I/O达1024点,模拟量I/O达256点,内置TCP/IP通信接口,很容易接入管理网,配有PROFIBUS-DP现场总线的主站,从站和远程I/O,并与合作伙伴一起推出了 InterControl G3小型可编程序控制器系统。在国外产品强手如林的情况下,这些产品已具有和国外同类产品进行竞争的能力,充分说明国产可编程序控制器发展已进入了一个新的阶段。
PLC控制系统设计的基本原则是什么
任何一种电气控制系统都是为了实现生产设备或生产过程的控制要求和工艺需要,从而提高产品质量和生产效率。因此,在设计PLC应用系统时,应遵循以下基本原则:
1.充分发挥PLC功能,**限度地满足被控对象的控制要求。
2.在满足控制要求的前提下,力求使控制系统简单、经济、使用及维修方便。
3.保证控制系统安全可靠。
4.应考虑生产的发展和工艺的改进,在选择PLC的型号、I/O点数和存储器容量等内容时,应留有适当的余量,以利于系统的调整和扩充。
设计PLC应用系统时,首先是进行PLC应用系统的功能设计,即根据被控对象的功能和工艺要求,明确系统必须要做的工作和因此必备的条件。然后是进行PLC应用系统的功能分析,即通过分析系统功能,提出PLC控制系统的结构形式,控制信号的种类、数量,系统的规模、布局。**后根据系统分析的结果,具体的确定PLC的机型和系统的具体配置。
SIMATIC S7 PLC处理输入/输出中断的使用方法介绍
概述
本程序适用于SIMATIC S7-212和S7-214的计数器,可以从0计到255,这要取决于输入10.0的状态。如果将输入10.0置为1,则程序减计数;如果将输入10.0置为0,则程序加计数。
如果输入10.0的状态改变,则将立即激活输入/输出中断程序,中断程序0或1分别将有储器位M0.0置成1或0。
例图

程序框图

程序和注解
本程序是一个输入/输出中断程序的范例,计数器从0计到255。如果输入10.0为0,则程序加计数;如果输入10.0为1,则程序减计数。
本程序包括以下三个程序:
Main (主程序) 初始化和计数
INT0 (中断程序0) 输入10.0为1时,减计数。
INT1 (中断程序1) 输入10.0为0时,加计数。
本程序长度为32个字
//标题:事件中断
//********主程序*********
//主程序包括初始化程序和计数程序。
//计数器的存储器标志位M0.0的0或1状态,决定计数方向为加或减计数。
//当输入10.0山0变为1时,产生中断事件0,激活中断程序0 (INT0)。
//中断程序0将存储器位M0.0置成1,导致主程序减计数。
//当输入10.0山1变为0时,产生中断事件1,激活中断程序1 (INT1)。
//中断程序1将存储器位M0.0置成0,导致主程序加计数。
//主程序
|
LD MOVB ENI ATCH ATCH LDN AB>= A EU INCW
|
SM0.1 +0, AC0
+0, 0 +1,1 M0.0 16#FE, ACO SM0.5
AC0
|
//仅首次扫描时,SM0.1才为1,进行以下初始化 //将计数累加器ACO清Oa //允许中断。 //输入10.0为上升沿时激活事件中断0 //输入10.0为上升沿时激活事件中断1 //如果存储器的标志位M 0.0为0状态 //且计数累加器ACO的当前计数值小于或等于254 //且0.5秒脉冲 //且上升沿 //那么计算累加器ACO加1
|
|
LD AB<= A EU DECW
|
M0.0 16#1,AC0 SM0.5
ACO |
//如果存储器的标志位M 0.0为1状态 //且计数累加器ACO的当前计数值大于或等于 //且0.5秒脉冲 //且上升沿 //那么计算器累加器ACO减1
|
|
LD MOVB MEND
|
SM0.0 AC0, QB0 |
// SM0.0总是1。 //在输出端00.0至00.7显示ACO的当前计数值。 //主程序结束。
|
//******中断程序0******
//事件中断程序0将存储器的标志位M0.0置成
//此情况下程序减计数。
//
INT 0 //中断事件0减计数。
S M0.0,1 //将存储器的标志位M0.0置成
RETI //中断程序0结束。
//******中断程序1******
//事件中断程序1将存储器的标志位M 0.0置成Oa
//此情况下程序增计数。
INT 1
R M0.0,1
RETI
//中断事件1加计数。
//将存储器的标志位M0.0置成O。
//中断程序1结束。
请参考SIMATIC S丁EP 7编程参考手册的6.2节“中断指令”,为您提供了更多的有关输入输出中断的信息。
实数和长整数间的转换——西门子S7系列PLC
|
指 令 |
说 明 |
|
RND |
将实数化整为**接近的整数。 |
|
RND+ |
将实数化整为大于或等于该实数的**小整数 |
|
RND- |
将实数化整为小于或等于该实数的**整数 |
|
TRUNC |
取实数的整数部分(截尾取整) |
因为实数的数值范围远大于32位整数,所以有的实数不能成功地转换为32位整数。如果被转换的实数格式非法或超出了32位整数的表示范围,则在累加器1中得不到有效结果,而且状态字中的OV和OS被置1。
上面的指令都是将累加器1中的实数化整为32位整数,因化整的规则不同,所以在累加器1中得到的结果也不一致,如下表
|
执行的 指令 |
累加器l内容 |
说 明 |
|
|
化整前 |
化整结果 |
||
|
RND |
+99.5 |
+100 |
将实数化整为**接近的整数 |
|
RND+ |
+99.5 |
+100 |
将实数化整为大于或等于该实数的**小整数 |
|
RND- |
+99.5 |
+99 |
将实数化整为小于或等于该实数的**整数 |
|
TRUNC |
+99.5 |
+99 |
只取实数的整数部分(截尾取整 |