品牌:西门子
起订:1台
供应:9999台
发货:1天内
信息标签:西门子S120控制器模块6SL3000-0BE34-4AA0,供应,电子、电工,工控系统及装备
点击这里进行电话呼叫
点击这里QQ咨询
联系时一定要说在【贸易商务资源网】看到的将给您优惠!如果您也想和该公司一样在网站发信息有好排名,点击立即免费注册,发布产品推广。

西门子S120控制器模块6SL3000-0BE34-4AA0 西门子S120控制器模块6SL3000-0BE34-4AA0
高价回收西门子PLC模块工程余货 高价回收西门子PLC模块工程余货
西门子中国回收中心 回收西门子DO模块 回收西门子DI模块 回收西门子AO模块 回收西门子AI模块,西门子扩展模块



=================================== =========
SIEMENS 上海隆彦智能科技有限公司
联系人 :李 建( 销售经理)
24小时服务热线 :15800846971
公司传真( Tel ):021-67355123
工作QQ:3192212451
全新原装,质量保证,保修一年,提供技术服务,价格合理!
============================================
上海隆彦长期销售西门子PLC200.300.400.S1200.S1500.ET200.Smart200,6SE70变频器.70备件.6SY7000/7010.C98面板,6RA70/28/24直流调速器,6XV电缆,6EP电源,3RW30/40/44软启动器,6AV人机触摸屏,LOGO!,6SL系列G110.G120.S120.V10.V20,MM440/430/420变频,6DR阀门定位器,7ML.7ME.7MF.7MH仪表仪器,6FC.6SN伺服数控,电机等西门子系列产品
《销售态度》:质量保证、诚信服务、及时到位!
《销售宗旨》:为客户创造价值是我们**追求的目标!
《服务说明》:现货配送至全国各地含税(17%)含运费!
《产品质量》:原装**,全新原装!
《产品优势》:专业销售 薄利多销 信誉好,口碑好,价格低,货期短,大量现货,服务周到!
1FK7电机与SINAMICS S120 驱动系统共同使用,就可形成功能强大的高性能系统。 根据应用用于速度和位置控制的集成编码器系统可以分为:
这种电机被设计为工作时无需外冷,由电机表面进行散热。 1FK7电机具有高的过载能力。

用西门子PLC构成邮件分拣控制系统实训举例
一、实验设备
YX-80系列PLC实训装置;
个人计算机(WINDOW ),
PC/PPI编程线缆、STEP7Micro/WIN32编程环境;
连接导线一套。
邮件分拣机实验板,如图1所示;

注:邮件分拣机实验板的输入端子为一特殊设计的端子,其原画图如图2所示,它的功能是:当输出端MS为ON时,S1自动产生脉冲信号模拟测量电动机转速光码盘信号。

二、实验内容
①控制要求:启动后绿灯L2亮表示可以进邮件,S2为ON表示检测到了邮件,拨码器(I0.0-I0.3)模拟邮件的邮码,从拨码器读到邮码的正常值为1, 2, 3, 4, 5, 若非此5个数,则红灯L1闪烁,表示出错,电动机MS停止。重新启动后,能重新运行,若此5个数中的任一个,则红灯L1亮,表示系统正在分拣。电动机M5运行,将邮件分拣至箱内完成L1灭,L2亮,表示可继续分拣邮件。
②IO口分配

③编辑调试并运行程序
三、编程练习
根据下述两种控制要求,编制多个邮件分拣控制程序,调试并运行程序。
①开机绿灯亮,电动机M5运行,当检测到邮件的邮码不是(1, 2, 3, 4, 5)任何一个时,则红灯L1闪烁,M5停止,重新启动。
可同时分拣到多个邮件。邮件一件接一件地被检到它的到来和它的邮码,机器将每个邮件分拣到其对应的信箱中。例如,在n2时刻,S2检测到邮码为2的邮件时,如果高速计数器的计数值为m2,则M2在(m2+n2 )时刻动作,若高速计数器的计数值为m3,当在n3时刻检测到一个邮码为3的邮件时,M3在(m3+n3)时刻动作。
②开机绿灯亮,电动机M5运行,当检测到邮件的邮码不是(1, 2, 3, 4, 5)中的任何一个时,则红灯L1闪烁,MS停止运行,当检测到邮件欠资或未贴邮票时则蜂鸣器发生响声,M5停止。按动启动按钮,表示故障清除,重新运行。
可同时分拣多个邮件,其它要求同上。
西门子PLCBCD码与整数的转换指令举例
BCD码与整数之间的转换的指令
|
LAD |
|
|
|
STL |
BCDI OUT |
IBCD OUT |
|
操作数及数据类型 |
IN :VW, IW, QW, MW, SW, SMW, LW, T, C, AIW, AC, 常量 OUT:VW, IW, QW, MW, SW, SMW, LW, T, C, AC IN/OUT数据类型:字 |
|
|
功能及 说明 |
BCD-I指令将二进制编码的十进制数IN转换成整数,并将结果送入OUT指定的存储单元。IN的有效范围是BCD码 0至9999 |
I-BCD指令将输入整数IN转换成二进制编码的十进制数,并将结果送入OUT指定的存储单元。IN的有效范围是0至9999 |
|
ENO=0的错误条件 |
0006 间接地址,SM1.6 无效BCD数值,SM4.3 运行时间 文章来自PLC之家pcl100.com |
|
注意:(1)数据长度为字的BCD格式的有效范围为:0~9999(十进制),0000~9999(十六进制)0000 0000 0000 0000~1001 1001 1001 1001(BCD码)。
(2)指令影响特殊标志位SM1.6(无效BCD)。
(3)在表5-10的LAD和STL指令中,IN和OUT的操作数地址相同。若IN和OUT操作数地址不是同一个存储器,对应的语句表指令为: MOV IN OUT
BCDI OUT
液体混合装置控制的模拟
一、 实验目的
1、 通过对工程实例的模拟,熟练地掌握PLC的编程和程序调试方法。
2、 进一步熟悉PLC的I/O连接。
3、 熟悉三层楼电梯采用轿厢内外按钮控制的编程方法。
二、控制要求
电梯由安装在各楼层厅门口的上升和下降呼叫按钮进行呼叫操纵,其操纵内容为电梯运行方向。电梯轿厢内设有楼层内选按钮S1~S3,用以选择需停靠的楼层。L1为一层指示、L2为二层指示、L3为三层指示,SQ1~SQ3为到位行程开关。电梯上升途中只响应上升呼叫,下降途中只响应下降呼叫,任何反方向的呼叫均无效。例如,电梯停在一层,在三层轿厢外呼叫时,必须按三层上升呼叫按钮,电梯才响应呼叫(从一层运行到三层),按三层下降呼叫按钮无效;反之,若电梯停在三层,在一层轿厢外呼叫时,必须按一层下降呼叫按钮,电梯才响应呼叫,按三层上升呼叫按钮无效,依此类推。
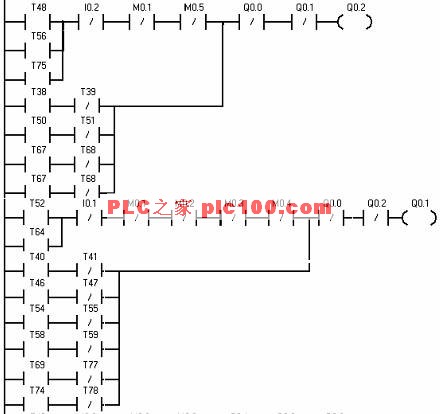
三、 编制梯形图并写出程序,
参考程序 表6-10-1所示
|
步序 |
指 令 |
步序 |
指 令 |
|
0 |
LD T48 |
13 |
OLD |
|
1 |
O T56 |
14 |
LD T67 |
|
2 |
O T75 |
15 |
AN T68 |
|
3 |
AN I0.2 |
16 |
OLD |
|
4 |
AN M0.1 |
17 |
OLD |
|
5 |
AN M0.5 |
18 |
AN Q0.0 |
|
6 |
LD T38 |
19 |
AN Q0.1 |
|
7 |
AN T39 |
20 |
= Q0.2 |
|
8 |
LD T50 |
21 |
LD T52 |
|
9 |
AN T51 |
22 |
O T64 |
|
10 |
OLD |
23 |
AN I0.1 |
|
11 |
LD T67 |
24 |
AN M0.1 |
|
12 |
AN T68 |
25 |
AN M0.2 |
|
步序 |
指 令 |
步序 |
指 令 |
|
26 |
AN M0.3 |
55 |
LD T44 |
|
27 |
AN M0.4 |
56 |
AN T45 |
|
28 |
LD T40 |
57 |
LD T62 |
|
29 |
AN T41 |
58 |
AN T63 |
|
30 |
LD T46 |
59 |
OLD |
|
31 |
AN T47 |
60 |
LD T72 |
|
32 |
OLD |
61 |
AN T73 |
|
33 |
LD T54 |
62 |
OLD |
|
34 |
AN T55 |
63 |
AN Q0.1 |
|
35 |
OLD |
64 |
AN Q0.2 |
|
36 |
LD T58 |
65 |
= Q0.0 |
|
37 |
AN T59 |
66 |
LD I0.2 |
|
38 |
OLD |
67 |
AN I0.4 |
|
39 |
LD T69 |
68 |
AN I0.5 |
|
40 |
AN T77 |
69 |
A I0.3 |
|
41 |
OLD |
70 |
LD M0.1 |
|
42 |
LD T74 |
71 |
AN M0.3 |
|
43 |
AN T78 |
72 |
OLD |
|
44 |
OLD |
73 |
AN I0.0 |
|
45 |
OLD |
74 |
= M0.1 |
|
46 |
AN Q0.0 |
75 |
AN M2.0 |
|
47 |
AN Q0.2 |
76 |
TON T38, +10 |
|
48 |
= Q0.1 |
77 |
LD T38 |
|
49 |
LD T42 |
78 |
TON T39, +30 |
|
50 |
O T60 |
79 |
LD T39 |
|
51 |
O T70 |
80 |
AN I0.2 |
|
52 |
AN I0.0 |
81 |
TON T40, +30 |
|
53 |
AN M0.3 |
82 |
TON T41, +50 |
|
54 |
AN M0.6 |
83 |
TON T42, +80 |
|
步序 |
指 令 |
步序 |
指 令 |
|
84 |
TON T43, +100 |
116 |
TON T50, +10 |
|
85 |
LD I0.0 |
117 |
LD T50 |
|
86 |
AN I0.3 |
118 |
TON T51, +30 |
|
87 |
AN I0.4 |
119 |
LD T51 |
|
88 |
A I0.5 |
120 |
AN I0.2 |
|
89 |
LD M0.3 |
121 |
TON T52, +30 |
|
90 |
AN M0.1 |
122 |
TON T53, +50 |
|
91 |
AN M0.5 |
123 |
LD I0.2 |
|
92 |
OLD |
124 |
AN I0.5 |
|
93 |
AN I0.2 |
125 |
A M0.1 |
|
94 |
= M0.3 |
126 |
A M0.5 |
|
95 |
AN M2.1 |
127 |
AN M2.1 |
|
96 |
TON T44, +10 |
128 |
LD M2.0 |
|
97 |
LD T44 |
129 |
AN M0.2 |
|
98 |
TON T45, +30 |
130 |
AN M0.3 |
|
99 |
LD T45 |
131 |
AN M0.4 |
|
100 |
AN I0.0 |
132 |
AN M0.6 |
|
101 |
TON T46, +30 |
133 |
OLD |
|
102 |
TON T47, +50 |
134 |
AN I0.0 |
|
103 |
TON T48, +80 |
135 |
= M2.0 |
|
104 |
TON T49, +100 |
136 |
TON T67, +10 |
|
105 |
LD I0.2 |
137 |
LD T67 |
|
106 |
AN I0.3 |
138 |
TON T68, +30 |
|
107 |
AN I0.5 |
139 |
LD T68 |
|
108 |
A I0.4 |
140 |
AN I0.2 |
|
109 |
LD M0.5 |
141 |
AN I0.1 |
|
110 |
AN M0.2 |
142 |
LD M3.0 |
|
111 |
AN M0.4 |
143 |
AN I0.0 |
|
112 |
OLD |
144 |
OLD |
|
113 |
AN I0.0 |
145 |
TON T69, +10 |
|
114 |
= M0.5 |
146 |
TON T77, +30 |
|
115 |
AN M2.0 |
147 |
= M3.0 |
|
步序 |
指 令 |
步序 |
指 令 |
|
148 |
LD M3.0 |
178 |
TON T59, +30 |
|
149 |
AN I0.1 |
179 |
LD T59 |
|
150 |
TON T70, +30 |
180 |
AN I0.1 |
|
151 |
TON T71, +50 |
181 |
TON T60, +30 |
|
152 |
LD I0.1 |
182 |
TON T61, +50 |
|
153 |
AN I0.3 |
183 |
LD I0.0 |
|
154 |
AN I0.4 |
184 |
AN I0.3 |
|
155 |
A I0.5 |
185 |
AN I0.5 |
|
156 |
LD M0.4 |
186 |
A I0.4 |
|
157 |
AN M0.1 |
187 |
LD M0.6 |
|
158 |
AN M0.5 |
188 |
AN M0.2 |
|
159 |
OLD |
189 |
AN M0.4 |
|
160 |
= M0.4 |
190 |
OLD |
|
161 |
TON T54, +10 |
191 |
AN I0.2 |
|
162 |
LD T54 |
192 |
= M0.6 |
|
163 |
TON T55, +30 |
193 |
AN M2.1 |
|
164 |
LD T55 |
194 |
TON T62, +10 |
|
165 |
AN I0.1 |
195 |
LD T62 |
|
166 |
TON T56, +30 |
196 |
TON T63, +30 |
|
167 |
TON T57, +50 |
197 |
LD T63 |
|
168 |
LD I0.1 |
198 |
AN I0.0 |
|
169 |
AN I0.4 |
199 |
TON T64, +30 |
|
170 |
AN I0.5 |
200 |
TON T65, +50 |
|
171 |
A I0.3 |
201 |
LD I0.0 |
|
172 |
LD M0.2 |
202 |
AN M0.3 |
|
173 |
AN M0.6 |
203 |
A M0.3 |
|
174 |
OLD |
204 |
A M0.6 |
|
175 |
= M0.2 |
205 |
AN M2.0 |
|
176 |
TON T58, +10 |
206 |
LD M2.1 |
|
177 |
LD T58 |
207 |
AN M0.1 |
|
步序 |
指 令 |
步序 |
指 令 |
|
208 |
AN M0.2 |
260 |
AN T57 |
|
209 |
AN M0.4 |
261 |
AN T76 |
|
230 |
AN M0.5 |
261 |
= Q0.7 |
|
231 |
OLD |
263 |
= M1.0 |
|
232 |
AN I0.2 |
264 |
LD I0.0 |
|
233 |
= M2.1 |
265 |
O I0.2 |
|
234 |
TON T72, +10 |
266 |
A I0.4 |
|
235 |
LD T72 |
267 |
O M1.1 |
|
236 |
TON T73, +30 |
268 |
AN T41 |
|
237 |
LD T73 |
269 |
AN T47 |
|
238 |
AN I0.0 |
270 |
AN T53 |
|
239 |
A I0.1 |
271 |
AN T65 |
|
240 |
LD M3.1 |
272 |
AN T77 |
|
241 |
AN I0.2 |
273 |
A T78 |
|
242 |
OLD |
274 |
= Q0.6 |
|
243 |
TON T74, |
275 |
= M1.1 |
|
244 |
+10 |
276 |
LD I0.1 |
|
245 |
TON T78, |
277 |
O I0.2 |
|
246 |
+30 |
278 |
A I0.3 |
|
247 |
= M3.1 |
279 |
O M1.2 |
|
248 |
LD M3.1 |
280 |
AN I0.0 |
|
249 |
AN I0.1 |
281 |
AN T43 |
|
250 |
TON T75, |
282 |
AN T61 |
|
251 |
+30 |
283 |
AN T71 |
|
252 |
TON T76, |
284 |
= Q0.5 |
|
253 |
+50 |
285 |
= M1.2 |
|
254 |
LD I0.1 |
286 |
LD M0.1 |
|
255 |
O I0.1 |
287 |
AN T43 |
|
256 |
A I0.5 |
288 |
LD M0.2 |
|
257 |
O M1.0 |
289 |
AN T61 |
|
258 |
AN I0.2 |
290 |
OLD |
|
259 |
AN T49 |
291 |
LD M0.5 |
|
步序 |
指 令 |
步序 |
指 令 |
|
292 |
AN T53 |
302 |
AN T57 |
|
293 |
OLD |
303 |
OLD |
|
294 |
O M2.0 |
304 |
LD M0.6 |
|
295 |
AN I0.0 |
305 |
AN T65 |
|
296 |
AN T71 |
306 |
OLD |
|
297 |
AN Q0.3 |
307 |
O M2.1 |
|
298 |
= Q0.4 |
308 |
AN I0.2 |
|
299 |
LD M0.3 |
309 |
AN T76 |
|
300 |
AN T49 |
310 |
AN Q0.4 |
|
301 |
LD M0.4 |
311 |
= Q0.3 |
参考梯形图如下所示:
SIMATIC S7-1200小型可编程控制器简介
2009年5月18日,西门子在西门子北京中心举办了全新小型可编程控制器系列S7-1200发布仪式,自此,这款全球销售的小型可编程控制器系列正式在中国发售。这款SIMATIC家族的新成员集成

PROFINET接口,具有卓越的灵活性和可扩展性,同时集成高级功能,如高速计数、脉冲输出、运动控制等。至此,编程软件STEP 7 Basic V10.5与其完美整合的小型可编程控制器和KTP精简系列形成统一工程系统,为小型自动化领域紧凑、复杂的自动化任务提供了整体解决方案。SIMATIC 系列控制器诞生于1958年,历经50余年锤炼,她已成为全球冶金、交通、环保、市政等各领域均有广泛应用的自动化控制器产品。
SIMATIC S7-1200 小型可编程控制器充分满足于中小型自动化的系统需求。在研发过程中充分考虑了系统、控制器、人机界面和软件的无缝整合和高效协调的需求。SIMATIC S7-1200 集成了PROFINET接口,使得编程、调试过程以及控制器和人机界面的通信可以全面地使用PROFINET工业以太网技术,并对现有的PROFIBUS系统的升级提供了很好的支持。
同时,SIMATIC S7-1200 小型控制器的设计具备可扩展性和灵活性,使其能够**完成自动化任务对控制器的复杂要求。CPU本体可以通过嵌入输入/输出信号板完成灵活扩展。“信号板” 是S7-1200的一大亮点,信号板嵌入在CPU模块的前端,可以提供两个数字量输入/数字量输出接口或者一个模拟量输出。这一特点使得系统设计紧凑,配置灵活。同时通过独立的RS-232 或 RS-485通信模块可实现S7-1200通信灵活扩展。
SIMATIC S7-1200 系列的问世,标志着西门子在原有产品系列基础上拓展了产品版图,代表了未来小型可编程控制器的发展方向,西门子也将一如既往开拓创新,引领自动化潮流。

用S7-200控制可双向运转的三相感应电动机
可逆电动机起动器电路一一适用于改变三相交流感应电动机旋转方向
这个示例程序用于控制可双向运转的三相感应电动机。
当与输入点I0.0相连的左转点动开关(Le)闭合时,电动机逆时针方向旋转,当与输入点I0.1相连的右转点动开关(Ri)闭合时,电动机顺时针方向旋转。但这要有一个前题,即与输入点I0.3相连的电动机电路断路器和与输入点I0.2相连的停机开关(OFF)都没有动作。只有按下停机开关,并等待5秒钟之后,才可以改变电动机的旋转方向。这样做是为了让电动机有足够的时问刹车停转,然后再反向起动,如果需要电动机反转的话。如
果与I0.0和I0.1相连的点动开关同时按下,电动机停转,并且小起动。

程序框图

程序和注释
在程序起始部分,程序检查是否必须激活互锁电路。互锁电路防比电动机误起动,或者按错误方向起动。只有当所有点动开关都没有动作(位于起始状态)或者等待时问溢出时,互锁才清除,即M2.0被置成逻辑0.
如果电动机断路器(输入点10.3)没有动作,停机点动开关(输入点10.2)也没有动作(这两个触点都是常闭触点);并且状态位M1门没有被设置成顺时针旋转标志,则使能位M 2.1被置为逻辑1。电动机才有可能逆时针旋转。代表逆时针旋转的状态位是M1.0。用类似方法可得到顺时针方向旋转的起动条件。
当点动起动开关(1e和Ri)这一动作,并且互锁位和状态位都没有被设置成相反的旋转方向时,电动止起动。即相关的输出位和状态位被置位,状态位的作用是使输出能够自保。电动止逆时针方向旋转起动器由输出点Q0.0控制。电动机顺时针方向旋转起动器由输出点Q0.1控制。
除此外,另有一组信号灯指示电动机当前的运行状态;逆时针方向旋转指示灯(Le)与输出点00.4相连;顺时针方向旋转指示灯(Ri)与输出点00.3相连;关电机指示灯(OFF)与输出点00.2相连。
当电动机被停机时,"ED”的下降沿将辅助存储位M 2.3置为1,进入停机模式。当M 2.3被置位时,限制电动机再次起动的定时器开始计时,该定时器的预置时问是5秒(500 X10ms),经过5秒钟后,内部存储器位M 2.3被复位。在这段强制等待时问内与输出点Q0.5相连的信号灯(Wait)闪烁。如果状态位都没有被置位,则点亮与输出点00.2相连的停止状态指示灯(OFF)。
该程序的长度为61个字。



