品牌:西门子
起订:1台
供应:9999台
发货:1天内
信息标签:西门子6SL3330-7TE41-0AA3,供应,电子、电工,工控系统及装备
点击这里进行电话呼叫
点击这里QQ咨询
联系时一定要说在【贸易商务资源网】看到的将给您优惠!如果您也想和该公司一样在网站发信息有好排名,点击立即免费注册,发布产品推广。

西门子6SL3330-7TE41-0AA3 西门子6SL3330-7TE41-0AA3
|
上海隆彦自动化设备有限公司(西门子代理商) 联系人 李 工 |
||
| 全国直销: 15800846971 |
|
|
| 现货销售: | 021-61311951 | |
| 腾讯咨询: | 3192212451 | |
|
100%的西门子进货渠道给你100%的放心品质。
|
||
上海隆彦自动化设备有限公司主要经营: 西门子PLC模块,s7-200CN、s7-300、s7-400、s7-1200、ET200,西门子变频器,西门子触摸屏,西门子交换机,西门子工控机,西门子V80伺服系统,西门子V90伺服系统,西门子DP总线,西门子总线连接器

根据实际应用情况,SIMOREG®直流驱动系统经常是价格**有利的驱动器解决方案。在可靠性、操作友好性和性能方面有许多优点。如果您正在寻找具有**经济有效性的直流驱动系统解决方案,那么您完全可以信赖具有**高输出和集成智能能力的 SIMOREG DC-MASTER 驱动器调速器。具体说来,它们具有西门子产品**的特点:全集成自动化。这意味着您可以从它们能够完全的集成到西门子系统环境中获益:在进行工程组态/组态和编程时,使用公共的数据库和集成通讯方式——使您可以在多方面节省资金!

西门子 SIMOREG 产品系列可以通过简单、同意的操作员控制体系进行自我诊断。无需编程知识,所有的设置都可以全部用电子方式完成。如果您对用户友好性的进行试运行感兴趣,那么通过一台 PC 就可以实现带菜单提示的启动调试。
此外,SIMOREG DC-MASTER 采用 BICO 技术,提高了软件的功能性,可以有效的缩短工程组态时间,并降低成本。
SIMOREG DC-MASTER 系列现有多种版本——在输出范围上从
6.3 kW 到 2500 kW,还包括电枢和励磁供电、单机和四象限驱动系统等版本。
它可以完全集成到任何自动化环境中
可以用模块方式扩展——从标准应用到高性能解决方案
通过并联**高可扩展到 18000A
额定供电电压 400V到 950V
通过对所有设置全部实现电子方式的参数化缩短了试运行时间
统一的操作员控制体系
SIMOVERT MASTERDRIVES 超紧凑型
SIMOVERT MASTERDRIVES 是交流变频器。它们可将交流电机转变为高精度可变速驱动器。此系列驱动器在全球范围内通用,适用于 230 - 690 V 范围内的全部供电电压,并且进行了全球范围的认证。
SIMOVERT MASTERDRIVES 是一个变频器系统。它们是一种模块化的单元系列,可**满足每一种应用要求,并可在所有工业领域内使用。它们拥有可满足各种要求的**闭环控制:SIMOVERT MASTERDRIVES VC 采用频率控制和矢量控制,而 SIMOVERT MASTERDRIVES MC 采用适用于极高动态性能的伺服控制。 极为节省空间的电源
西门子具有超紧凑设计的 SIMOVERT MASTERDRIVES 系列变频器完美适合需要在极小空间内提供极高额定功率的所有应用。这个变频器系统现已通过逆变器(直流转交流装置)进行扩展,功率高达 37 kW (50 HP)。
请阅读或订购我们的市场营销资料。
SIMOVERT MASTERDRIVES 经过设计,已进行**的统一:它们拥有统一的操作员控制方式,可根据需要进行组合,甚至可带有具有不同控制方式的单元,并且在设计上也是统一的。不管是单个驱动器还是多电机驱动器,它们始终会以系统模块的形式提供**解决方案。
功能特点
可进行模块化扩展:使用操作员控制面板、终端扩展模块、制动模块、输入和输出滤波器
转速和转矩精度较高
具有优异的动态性能
在低转速下具有极平稳的运行特性
具有较高过载能力
具有较高功率密度
具有**性价比
可使用 PATH 方便、友好地进行组态
输出范围
0.55 - 710 kW SIMOVERT MASTERDRIVES MC (400V)
2.2 - 6000 kW SIMOVERT MASTERDRIVES VC
SINAMICS G130 内置式变频器设计用于机器制造和工厂建设中使用的交流变频器。
具有较高性能, 可满足各种负载类型的单电机驱动应用。
无传感器矢量控制的控制精度适合大多数应用,因此,无需使用附加实际转速编码器。
SINAMICS G130 可以提供一种经济的驱动解决方案,它能够通过丰富的组件和选配件满足各种各样的用户需求。

|
电源电压: |
输出范围: |
|
供电系统: |
TN/TT 或 IT |
|
线路频率: |
47 ~ 63 Hz |
|
输出频率: |
0 ~ 300 Hz |
|
控制方法: |
带编码器的闭环矢量控制或 V/f 控制 |
|
固定频率: |
15 个固定频率加 1 个基本频率,可编程 |
|
跳跃频率频带: |
4,可编程 |
|
用户接线排: |
数字量输入/输出 |
|
通讯接口: |
标配 PROFIBUS DP 接口 |
|
制动模式: |
制动模式作为系统组件 |
|
防护等级: |
IP00 |
|
冷却方式: |
内部风扇(强制空气冷却) |
|
噪声等级: |
≤ 72 dB (A),50 Hz 电源频率下 |
|
法规符合性: |
CE, cULus(不久将可供货) |
|
软件功能: |
- 因电源故障而发生操作中断时可自动重新启动 |
|
保护功能: |
电机和电源部分的热监视 |
|
安全功能: |
STO, SS1 (驱动系统的集成安全性功能) |
|
适宜的电机: |
感应电机 |
SINAMICS G130 变频装置为系统集成商和机器制造商提供了一种可满足特定应用要求的模块化传动系统.
SINAMICS G130 变频器由两个独立的模块部分组成:
- 功率单元
- 控制单元
控制单元可单独放置,也可内置在装置中。功率单元内留有一个插槽,用于安装控制单元.
通过端子板或PROFIBUS端口轻松实现对变频器的调试和控制。 界面友好的AOP30高级操作面板可进行启动和本地操控。控制模块可通过控制单元上的附加选件进行扩充。

SINAMICS G130 和 SIMATIC S7 组态举例
西门子6SL3330-7TE41-0AA3

PLC的三大应用领域简介——开关逻辑和顺序、过程控制、运动控制
(1) 开关逻辑和顺序控制:这是可编程序控制器**基本的控制功能,在工业场合应用**广泛,可代替继电器控制系统。开关量逻辑控制不但能用于单台设备,而且可用于生产线上。
(2) 过程控制:PLC通过模拟量I/O模块,可对温度、流量、压力等连续变化的模拟量进行控制。大中型PLC都具有PID闭环控制功能并已广泛地用于电力、化工、机械、冶金等行业。
(3) 运动控制:PLC可应用于对直线运动或圆周运动的控制,如数控机床、机器人、金属加工、电梯控制等。
1 引言
可编程序控制器是以微处理器为基础,综合计算机、通信、联网以及自动控制技术而开发的新一代工业控制装置。可编程序控制器在我国的发展与应用已有30多年的历史,现在它已经广泛应用于国民经济的各个工业生产领域,成为提高传统工业装备水平和技术能力的重要设备和强大支柱。随着全球一体化经济的发展,努力发展可编程序控制器在我国的大规模应用,形成具有自主知识产权的可编程序控制器技术,应该是广大技术人员努力的方向。
2 可编程序控制器的发展历程
可编程序控制器问世于 20 世纪 60 年代,当时的可编程序控制器功能都很简单,只有逻辑、定时、计数等功能;硬件方面用于可编程序控制器的集成电路还没有投入大规模工业化生产, CPU 以分立元件组成;存储器为磁心存储器,存储容量有限;用户指令一般只有二三十条,还没有成型的编程语言;机型单一,没有形成系列。一台可编程序控制器**多只能替代200~300个继电器组成的控制系统,在体积方面,与现在的可编程序控制器相比,可以说是庞然大物。
进入70年代,随着中小规模集成电路的工业化生产,可编程序控制器技术得到了较大的发展。可编程序控制器功能除逻辑运算外,增加了数值运算、计算机接口、模拟量控制等;软件开发有自诊断程序,程序存储开始使用EPROM ;可靠性进一步提高,初步形成系列,结构上开始有模块式和整体式的区分,整机功能从专用向通用过渡。
70年代后期和80年代初期,微处理器技术日趋成熟,单片微处理器、半导体存储器进入工业化生产,大规模集成电路开始普遍应用。可编程序控制器开始向多处理器发展,使可编程序控制器的功能和处理速度大为增强,并具有通信和远程 I/O 能力,增加了多种特殊功能,如浮点运算、三角函数、查表、列表等,自诊断和容错技术也迅速发展。
80年代后期到90年代中期,随着计算机和网络技术的普及应用,超大规模集成电路、门阵列以及专用集成电路的迅速发展,可编程序控制器的CPU已发展为由16位或32位微处理器构成,处理速度得到很大提高,高速计数、中断、PID、运动控制等功能引入了可编程序控制器。使得可编程序控制器能够满足工业生产过程的各个领域,可编程序控制器已完全取代了传统的逻辑控制装置,模拟量仪表控制装置和以小型机为核心的DDC(直接数字控制)控制装置。由于联网能力增强,既可和上位计算机联网,也可以下挂 FLEX I/O 或远程 I/O ,从而组成分布式控制系统(DCS)已无困难。梯型图语言和语句表语言完全成熟,基本上标准化,SFC(顺序功能图)语言逐步普及,专用的编程器已被个人计算机和相应编程软件所替代,人机界面装置日趋完善,已能进行对整个工厂的监控、管理,并发展了冗余技术,大大加强了可靠性。
进入21世纪,可编程序控制器仍保持旺盛的发展势头,并不断扩大其应用领域,如为用户配置柔性制造系统(FMS)和计算机集成制造系统(CIMS)。目前可编程序控制器主要向两 个方向扩展:一是综合化控制系统,它已经突破了原有的可编程序控制器的概念,将工厂生产过程控制与信息管理系统密切结合起来,甚至向上为MES和ERP系统准备了技术基础,这种发展趋势会使得举步为艰的ERP系统有了坚实的技术基础,从而会带来工业控制的一场变革,实现真正意义上的电子信息化工厂;二是微型可编程序控制器异军突起,体积如手掌大小,功能可覆盖单体设备及整个车间的控制功能,并具备联网功能,这种微型化的可编程序控制器使得控制系统可将触角延伸到工厂的各个角落。随着**经济一体化进程的加快,在技术发展的同时,发达国家更加注重了对可编程序控制器的知识产权的保护,国际大型可编程序控制器制造商纷纷加入了可编程序控制器的国际标准化组织,他们利用许多技术标准建立了符合他们经济利益的技术保护壁垒。
3 可编程序控制器在我国的发展
我国可编程序控制器的发展与国际上的发展有所不同,国际上可编程序控制器的发展是从研制、开发、生产到应用,而我国则是从成套设备引进、可编程序控制器引进应用、消化移植、合资生产到广泛应用。大致可划分为下述三个阶段:
(1) 可编程序控制器的初级认识阶段(70 年代后期到 80 年代初期)
国际上可编程序控制器的发展,首先引起了国内工程技术界的极大兴趣,所以我国对可编程序控制器的认识始于 70 年代后期到 80 年代初期的成套设备引进中,当时的上海宝钢一期工程中有多项工程引进了十几种机型约 200 多台可编程序控制器。这些可编程序控制器用于原料码头到高炉、轧钢、钢管等整个钢铁冶炼以及加工生产线上,取代了传统的继电器逻辑系统,并部分取代了模拟量控制和小型 DDC 系统。继宝钢一期工程后,国内许多厂家陆续引进的设备和生产线大都配备了可编程序控制器,其应用范围包括电站、石油化工、汽车制造、港口和码头等各领域。正是在成套设备引进过程中,我们打开了眼界,了解认识了可编程序控制器,这也促进了可编程序控制器在我国的发展。
(2) 可编程序控制器的引进应用和消化移植阶段(80 年代初期到90年代初期)
80年代初期开始,随着我国改革开放的不断深入,在成套设备引进的同时,国外原装的可编程序控制器开始涌入国内市场。许多部门和单位相继引进可编程序控制器并自己设计组成控制系统,其应用范围也扩大到建材、轻工、煤炭、水处理、食品、制药、造纸、橡胶和精细化工等工业领域。
随着应用能力的提高和市场需求的扩大,一些部门和单位本着技贸结合、消化移植的方针,一方面进行二次开发和应用研究,一方面也在引进可编程序控制器的生产线,建立生产可编程序控制器的合资企业,积极开发自己的产品。
同时,国内也开始研制可编程序控制器产品,当时在上海、北京、西安、广州、长春等地有约 20 多家科研单位、大专院校和工厂都在研制和生产可编程序控制器,但由于缺乏资金和后续研究力量、生产技术相对落后,只能停留在实验室阶段,没能投入实际应用和形成工业化生产。
(3) 可编程序控制器的广泛发展阶段(90 年代初期到现在)
进入90年代,我国的可编程序控制器进入了广泛发展阶段,主要表现在以下几个方面:
a. 政府重视
可编程序控制器的发展得到了政府的高度重视,在当时机械电子工业部的领导下,于 1991 年成立了可编程序控制器行业协会。可编程序控制器行业协会在政府和企事业之间起到了桥梁作用,沟通了情况,为做出决策提供了依据。同时可编程序控制器的标准化工作也受到了有关部门的重视,于 1993 年成立了可编程序控制器标准化技术委员会,为我国可编程序控制器的进一步发展打下了基础。
b. 应用更加广泛
这一阶段可编程序控制器的应用已经渗透到国民经济的各个部门和工业过程的各个角落,已成为企业提高装备技术水平的重要标志。在宝钢的二期三期工程中使用了国外多个厂家三十几种机型计六百多台套的可编程序控制器,在广西玉柴机器有限公司的柴油机生产线中使用了近二百台罗克韦尔自动化公司的可编程序控制器,像这样大范围使用可编程序控制器的系统已很常见。在这一阶段中,我国的工程技术人员充分显示出了设计应用、软件制作、设备成套的能力。**近,在笔者自行设计成套、软件开发、安装调试的我国西部大开发重点项目青海盐湖100万吨氯化钾项目中,采用可编程序控制器组成了全厂的自动化控制系统,并将可编程序控制器设计在MCC柜中,实现了全厂六百多面MCC柜、覆盖全厂各个工艺流程的综合自动化系统。该应用项目已引起国外各大公司的注意,罗克韦尔自动化公司邀请项目设计人员去美国公司总部进行介绍。
c. 研制、开发、生产取得成果
随着我国改革开放的不断深入,国外厂商纷纷看好中国的市场,在中国建立他们的办事处,甚至将他们的亚太总部设在中国。国内企业纷纷引进国外技术,从而促进了一批技术引进企业、合资企业的建立,带动了我国可编程序控制器行业的技术发展。可喜的是从90年代初期开始,由于可编程序控制器应用的不断深入,国内又掀起了自主研制开发可编程序控制器的高潮,虽然多为小型可编程序控制器,批量亦不大,但其功能、质量和可靠性已有明显的提高,代表产品如南京嘉华的JH200,I/O为12到120点,有高速计数器和模拟量功能;杭州新箭公司的D20P,其I/O为12/8点,D100的I/O可从40点扩展到120点;兰州全志的RD100、RD200,前者I/O为9/4点,2点模入,后者I/O为20~40点,扩展的功能有编码盘测速,热电偶测温和模拟量I/O,能联网32台RD200以及与PC机进行实时通信。同时,中大规模的可编程序控制器在国内也开始出现,交通部上海船舶运输研究所的STI2000,I/O为256点,多台联网时I/O可达4096点;北京和利时公司研制生产的Hollias-PLC 可编程序控制器,其中典型的产品为数字量I/O达1024点,模拟量I/O达256点,内置TCP/IP通信接口,很容易接入管理网,配有PROFIBUS-DP现场总线的主站,从站和远程I/O,并与合作伙伴一起推出了 InterControl G3小型可编程序控制器系统。在国外产品强手如林的情况下,这些产品已具有和国外同类产品进行竞争的能力,充分说明国产可编程序控制器发展已进入了一个新的阶段。
机床刀架运动控制系统的设计(附PLC接线图和梯形图)
图1给出了钻削加工时刀架的运动示意图。刀架开始时在限位开关X4处,按下起动按钮X0,刀架左行,开始钻削加工,到达限位开关X3所在位置时停止进给,钻头继续转动,进行无进给切削,6s后定时时间到,刀架自动返回起始位置。


在电动机正反转控制梯形图的基础上,设计出满足要求的PLC外部接线图和梯形图(见图2和图1)。为使刀架的进给运动自动停止,将左限位开关X3的常闭触点与控制进给的Y0的线圈串联。为了在左限位开关X3处进行无进给切削,用X3的常开触点来控制定时器T0的线圈,T0的定时时间到时,其常开触点闭合,给控制Y1的起保停电路提供起动信号,使Y1的线圈通电,刀架自动返回。刀架离开X3所在位置后,X3的常开触点断开,T0被复位。刀架回到X4所在位置时,X4的常闭触点断开,使Y1的线圈断电,刀架停在起始位置。
常用的塑壳式低压断路器(图)型号及选用
低压断路器也称自动开关或自动空气断路器。它是一种既能作开关用,又具有电路自动保护功能的低压电器。
(1)断路器有三大部分组成:
触头和灭弧系统——通断电路的部件
各种脱扣器——检测电路异常状态并作出反应,即保护性动作的部件;
操作机构和自动脱扣机构——中间联系部件。
(2)图是断路器外型、结构原理图。

结构图中触点2有三对,串联在被保护的三相主电路中。手动扳动按钮为“合”位置(图中未画出),这时触点2由锁键3保持在闭合状态,锁键3由搭钩4支持着。要使开关分断时,扳动按钮为“分”位置(图中未画出),搭钩4被杠杆7顶开(搭钩可绕轴5转动),触点2就被弹簧1拉开,电路分断。
自动开关的自动分断,是由电磁脱扣器6、欠压脱扣器11和热脱扣器12使搭钩4被杠杆7顶开而完成的。电磁脱扣器6的线圈和主电路串联,当线路工作正常时,所产生的电磁吸力不能将衔铁8吸合,只有当电路发生短路或产生很大的过电流时,电磁吸力才能将衔铁8吸合,撞击杠杆7,顶开搭钩4,使触点2断开,从而将电路分断。
欠压脱扣器11的线圈并联在主电路上,当线路电压正常时,欠压脱扣器产生的电磁吸力能够克服弹簧9的拉力而将衔铁10吸合,如果线路电压降到某一值以下,电磁吸力小于弹簧9的拉力,衔铁10被弹簧9拉开,衔铁撞击杠杆7使搭钩顶开,则触点2分断电路。当线路发生过载时,过载电流通过热脱扣器的发热元件13而使双金属片12受热弯曲,于是撞杆7顶开搭钩,使触点断开,从而起到过载保护作用。根据不同的用途,自动开关可配备不同的脱扣器。
(3)按结构分类自动开关有**式(框架式)和塑料外壳式(装置式)两种。控制线路中常用塑壳式自动开关作为电源引入开关或作为控制和保护不频繁起动、停止的电动机开关,以及用于宾馆、机场、车站等大型建筑的照明电路。其操作方式多为手动,主要有扳动式和按钮式两种。**式(框架式)主要用于供配电系统。
自动开关与刀开关和熔断器相比,具有以下优点:结构紧凑,安装方便,操作安全,而且在进行短路保护时,由于用电磁脱扣器将电源同时切断,避免了电动机缺相运行的可能。另外,自动开关的脱扣器可以重复使用,不必更换。
(4)常用的塑壳式断路器主要有DZ5、DZ10、DZ15、DZ20等系列。
低压断路器的型号含义举例说明如下,其技术数据见表1-2

表1-2 DZ15系列塑壳式断路器
|
型号 |
极数 |
额定电流(A) |
额定电压(V) |
额定短路 分断能力 (KA) |
机械寿命 (万次) |
电寿命 (万次) |
|
DZ15-40 |
1 |
6、10、16、20、25、32、40 |
AC220 |
3 |
1.5 |
1.0 |
|
2 、3 |
AC380 |
|||||
|
DZ15-63 |
1 |
10、16、20、25、32、40、50、63 |
AC220 |
5 |
1.0 |
0.6 |
|
2、3、4 |
AC380 |
用于电动机保护的断路器的热脱扣器要根据电动机的额定电流进行选择和整定,而瞬时过流电磁脱扣器则按照电动机额定电流的12倍来选择,以保证在电动机起动电流的峰值不至于动作。
西门子S7 PLC移位寄存器指令(SHRB)
移位寄存器指令是可以指定移位寄存器的长度和移位方向的移位指令。其指令格式如图所示。

说明:(1)移位寄存器指令SHRB将DATA数值移入移位寄存器。梯形图中,EN为使能输入端,连接移位脉冲信号,每次使能有效时,整个移位寄存器移动1位。DATA为数据输入端,连接移入移位寄存器的二进制数值,执行指令时将该位的值移入寄存器。S_BIT指定移位寄存器的**位。N指定移位寄存器的长度和移位方向,移位寄存器的**长度为64位,N为正值表示左移位,输入数据(DATA)移入移位寄存器的**位(S_BIT),并移出移位寄存器的**高位。移出的数据被放置在溢出内存位(SM1.1)中。N为负值表示右移位,输入数据移入移位寄存器的**高位中,并移出**位(S_BIT)。移出的数据被放置在溢出内存位(SM1.1)中。
(2)DATA和S-BIT的操作数为I, Q, M, SM, T, C, V, S, L 。数据类型为:BOOL变量。N的操作数为VB, IB, QB, MB, SB, SMB, LB, AC, 常量。数据类型为:字节。
(3)使ENO = 0的错误条件:0006(间接地址),0091(操作数超出范围),0092(计数区错误)。
(4)移位指令影响特殊内部标志位:SM1.1(为移出的位值设置溢出位)。
纺纱工艺流程及PLC控制系统
1、引言
HXFA368型条并卷联合机在纺纱的整个过程中是个瓶颈环节,一旦出现问题,后边整个生产过程就无法进行,所以要求设备控制系统稳定、性能可靠、使用方便和自动化程度高等特点。该控制系统将可编程序控制器(PLC)运算速度高、指令丰富、功能强大、可靠性高和抗干扰能力强等特点与触摸屏操作简单、功能强大、界面友好直观的特点结合在一起使用,使该系统具有很好的人机交互功能,在生产应用中取得很好的效果。
2、工艺流程及硬件结构设计
HXFA368条并卷联合机主要由成卷部分、牵伸部分、电气控制柜组成,结构简洁紧凑,在纺织备中起着承上启下的作用,其部分工作流程见图1:

图1工作流程图
系统采用中达电通公司DVP-60ES00R主机和DVP32XP(扩展模块)系列可编程控制器作为中心控制单元,输入点数52点,输出点数40点,共计92点。操作显示单元选用中达电通公司DOP-AE10THTD65536系列触摸屏,电机驱动选用中达电通公司VFD110B43A系列变频器控制。
在设备上共安装48个传感器和8个限位开关,其主要作用是负责各动作的定位、棉条有无的检测和脉冲信号的采样,传感器的输出信号都为开关量,以常开或常闭触点接入控制器的输入端子,选用24v直流电磁阀,直接用PLC的各输出点驱动电磁阀。设备通过一个电机和10个气缸完成系统机电气一体化控制,达到了设备的工艺要求。
3、系统软件设计
系统设计软件流程图如图2所示。
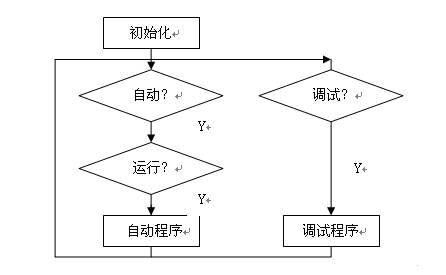
图2:程序流程图
3.1 系统初始化
每套控制程序初始化都是必需的,每一次PLC上电或对PLC强制复位都要初始化,主要对在程序中使用的各种计数器、定时器、寄存器等进行复位和设置,同时保留上次运行需要记忆的各种数据,完成运行前的各项准备工作。
3.3人机界面
控制柜上人机界面可使过程可视化,智能化,方便系统调试,增强系统故障之后的恢复能力,改善系统的可维护性,降低运行成本。
根据画面显示信息量采用十八个画面,各画面之间通过触摸键进行切换,同时触摸屏上各类组件的内存单元和与PLC中数据存储区的的单元相关联,构成系统整体监控。根据设备工艺要求设计了参数设定、系统调试、故障信息查询参数设定等画面。

参数设定画面
参数设定画面主要是为了给现场操作人员进行设备工艺参数调节使用的,根据棉纺工艺的不同,对棉卷大小进行调节,设备运行速度调节,棉卷滚出停止位置调节,动作的快慢进行调节等。系统调试画面是为设备调试和故障排除而设计的,通过此画面的24个按钮,可以对动作流程图中的每个动作进行单步执行来进行故障排除和设备调试。故障信息查询画面提供了故障报警和历史数据查找功能,一旦系统发生故障,屏上主画面出现故障原因,点击信息查询按钮故障报警画面分析报警原因,触摸屏提供了一个十分灵活和友好的窗口,方便现场人员的使用,增强了系统的可操作性。
在对DOP-AE10THTD65536触摸屏进行组态设计开发过程中,运用宏指令对控制程序进行了安全保护,防止用户对控制程序私自修改,造成事故发生,以下是部分宏指令:
\$133=(1