品牌:西门子
起订:1台
供应:9999台
发货:1天内
信息标签:西门子S120控制器模块6SL3320-1TG41-3AA3,供应,电子、电工,工控系统及装备
点击这里进行电话呼叫
点击这里QQ咨询
联系时一定要说在【贸易商务资源网】看到的将给您优惠!如果您也想和该公司一样在网站发信息有好排名,点击立即免费注册,发布产品推广。

西门子S120控制器模块6SL3320-1TG41-3AA3 西门子S120控制器模块6SL3320-1TG41-3AA3
描述
引用是两个块之间的连接。
在LOGO!8中块连接器之间的连接组态和块参数之间的引用组态是标准化的。引用和组态现在就可以使用拖放来实现。本FAQ对比了LOGO!8设备和LOGO!0BA7设备之间组态引用的步骤。
组态LOGO!8需要安装LOGO!Soft Comfort 8.0或更高版本。
LOGO!8的LOGO!模块的步骤
注意
下面的工具可以用来编辑参数区(LOGO!8)
| 图标 | 功能 |
|
|
显示/隐藏所有块之间的引用线 |
|
|
显示所有块的参数区 |
|
|
隐藏所有块的参数区 |
到LOGO! 0BA7前的LOGO!模块的步骤
更多信息
关于“引用”的更详细的信息可以在LOGO!Soft Comfort(V1.7) 条目ID 24002694中还有LOGO!Soft Comfort online Help (V8.0)3.2.1.8部分, "Edit Parameter Field"章节,在条目ID 100782807中。
创建环境
本FAQ中的截图是在LOGO!Soft Comfort V8.0中创建的。
1 LOGO!App 简介
目前用户可以使用iTunes商店的应用软件LOGO!App连接和监控西门子LOGO!系列的PLC,软件名称如图1所示。在软件中成功组态LOGO! 设备的地址后,用户可以通过手机WIFI连接到LOGO!并可进行修改时钟和获取固件信息等操作。同时,用户可以监控输入/输出(以下简称I/O)状态,V存储区(以下简称VM)变量值和诊断信息,也可以添加监控的I/O和VM变量到趋势图查看一个概览图形。

图1应用程序名称
2 LOGO!App功能描述
2.1 接口配置
LOGO! App 支持IP地址和动态 DynDNS名称两种访问方式。 做法如下:
在图2中单击“Interface Configure”选项后进入图3界面单击 “By IP Address”选项,然后再单击 图标 ![]() ,进入图4设备添加界面。
,进入图4设备添加界面。

图2设置功能界面 图3设备访问方式界面
在图4中单击“Add”按钮,进入图5中进行设备名称和设备IP地址设置,此处我们设置设备名称为“MyLogo”,IP地址为“192.168.1.108”,**后单击“Save”按钮保存此配置,页面会自动转入到图6界面。

图4设备添加界面 图5设备添加界面
在图6中长按 ![]() 图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。
图标直到出现图7界面,在图7中我们通过“Select”选项来选择已有设备,然后进入图8界面。

图6设备选择界面 图7设备选择界面
这时在图8中可以看到IP地址已经显示在界面中,然后点击“Save”图标,界面将自动转到图9。

图8设备访问方式界面
2.2 设置时钟
在图9中单击“Set Clock”选项将进入图10界面,在图10中可点击“Read”按钮查看LOGO!时间,也可点击“Current”按钮查看当前时间,之后进入图11界面。

图9设置功能界面 图10设备访问方式界面
在图11中LOGO!系统需要停机完成读取操作,单击“YES”图标进入图12,同样我们点击“Current”按钮来获取当前时间,然后通过“Set”按钮将当前屏幕中的时间更新到LOGO!中,此时进入图13界面。

图11获取LOGO!时钟界面 图12设备访问方式界面
在图13中点击“YES”按钮来完成更新后启动LOGO!的操作。

图13更新时钟界面
2.3 查看固件版本
在图14中单击“Show FW Version”选项后系统将返回LOGO!的固件版本如图15。

图14设置功能界面 图15固件版本界面
3 LOGO!App软件监控模式
3.1 I/O 状态监视器
在图16中选择“Monitor”图标,然后选择“I/O Status Monitor”选项后进入图17界面可观察到输入点的变化,在图17中用户选择需要监控的变量。可以通过点击“Edit”按钮进入图18中进行修改。

图16设置功能界面 图17 I/O监控界面
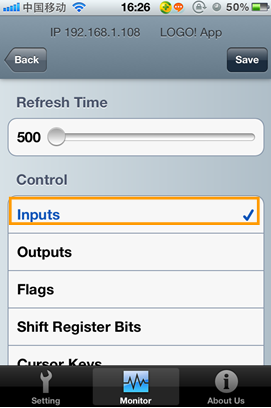
图18设置功能界面
3.2 VM列表监视器
在图19中单击“VM Table Monitor”选项进入图20的变量监控界面,点击“Add”按钮进入图21的变量添加界面。
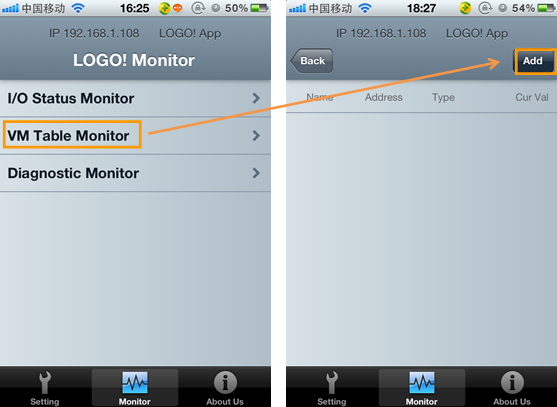
图19设置功能界面 图20 变量监控界面
在图21中填入变量名称、变量地址及变量数据类型后点击“Save”按钮,在变量监控界面图22中就可以监视或修改此变量的数值。

图21变量添加界面 图22 变量监控界面
此外,还可以用趋势图的方式来监控变量曲线。在图22中长按变量“speed”所在行,直至出现图23界面选择“Add To Chart”选项再返回图22界面,继续长按变量“speed”所在行,直至出现图24界面选择“Chart”选项,即进入图25的趋势图界面。

图23变量添加趋势图界面 图24 变量监控界面

图25趋势图界面
3.3 诊断监视器
在图26中单击“Diagnostic Monitor”选项后进入图27中可查看网络访问错误报警。

图26设置功能界面 图27 网络错误界面
如图28中选中“Network Access Error”标签后点击“Clear”按钮即可复位网络访问错误信息如图29所示。
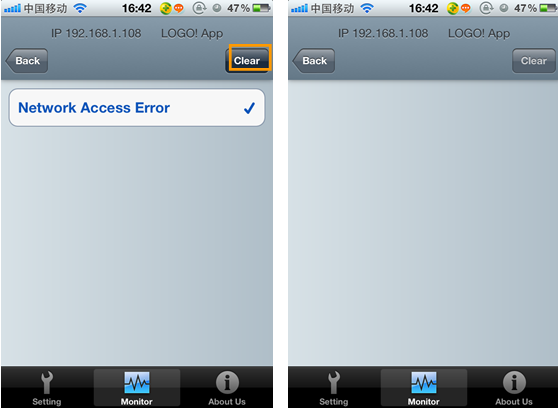
图28网络选择错误界面 图29 网络错误监控界面
6RA70 (三相桥B6C)
6RA7018-6DS22-0 3AC 400V 485V 30A 325V 5A
6RA7025-6DS22-0 60A 10A
6RA7028-6DS22-0 90A 10A
6RA7031-6DS22-0 125A 10A
6RA7075-6DS22-0 210A 15A
6RA7078-6DS22-0 280A 15A
6RA7081-6DS22-0 400A 25A
6RA7085-6DS22-0 600A 25A
6RA7087-6DS22-0 850A 30A
6RA7025-6GS22-0 3AC 575V 690V 60A 325V 5A
6RA7031-6GS22-0 125A 10A
6RA7075-6GS22-0 210A 15A
6RA7081-6GS22-0 400A 25A
6RA7085-6GS22-0 600A 25A
6RA7087-6GS22-0 800A 30A
6RA7086-6KS22-0 3AC 690V 900V 720A 30A.

电气控制原理图的阅读分析方法与步骤
|
1.基本原则 化整为零、顺藤摸瓜、先主后辅、集零为整、安全保护、全面检查。 采用化整为零的原则以某一电动机或电器元件(如接触器或继电器线圈)为对象,从电源开始,自上而下,自左而右,逐一分析其接通断开关系。 2.分析方法与步骤 ①分析主电路 无论线路设计还是线路分析都是先从主电路入手。主电路的作用是保证机床拖动要求的实现。从主电路的构成可分析出电动机或执行电器的类型、工作方式,起动、转向、调速、制动等控制要求与保护要求等内容。 ②分析控制电路 主电路各控制要求是由控制电路来实现的,运用“化整为零”、“顺藤摸瓜”的原则,将控制电路按功能划分为若干个局部控制线路,从电源和主令信号开始,经过逻辑判断,写出控制流程,以简便明了的方式表达出电路的自动工作过程。 ③分析辅助电路 辅助电路包括执行元件的工作状态显示、电源显示、参数测定、照明和故障报警等。这部分电路具有相对独立性,起辅助作用但又不影响主要功能。辅助电路中很多部分是受控制电路中的元件来控制的。 ④分析联锁与保护环节 生产机械对于安全性、可靠性有很高的要求,实现这些要求,除了合理地选择拖动、控制方案外,在控制线路中还设置了一系列电气保护和必要的电气联锁。在电气控制原理图的分析过程中,电气联锁与电气保护环节是一个重要内容,不能遗漏。 ⑤总体检查 经过“化整为零”,逐步分析了每一局部电路的工作原理以及各部分之间的控制关系之后,还必须用“集零为整”的方法检查整个控制线路,看是否有遗漏。特别要从整体角度去进一步检查和理解各控制环节之间的联系,以达到正确理解原理图中每一个电气元器件的作用。 |
S7-200 PLC编程中的寻址方式
在S7-200系列中,寻址方式分为两种:直接寻址和间接寻址。直接寻址方式是指在指令中直接使用存储器或寄存器的元件名称和地址编号,直接查找数据。间接寻址是指使用地址指针来存取存储器中的数据,使用前,首先将数据所在单元的内存地址放入地址指针寄存器中,然后根据此地址存取数据。本书仅介绍直接寻址。
直接寻址时,操作数的地址应按规定的格式表示。指令中数据类型应与指令相符匹配。
在S7-200系列中,可以按位、字节、字和双字对存储单元进行寻址。寻址时,数据地址以代表存储区类型的字母开始,随后是表示数据长度的标记,然后是存储单元编号;对于按位寻址,还需要在分隔符后指定位编号。
在表示数据长度时,分别用B、W、D字母作为字节、字和双字的标识符。
1)字节寻址(8 bit)
字节寻址由存储区标识符、字节标识符、字节地址组合而成。如VB100,其字节寻址方式如图所示。
字节寻址的格式:[区域标识][字节标识符].[字节地址]
2)字寻址(16 bit)
字寻址由存储区标识符、字标识符及字节起始地址组合而成。如VW100,其字寻址方式如图所示。
字寻址的格式:[区域标识][字标识符].[字节起始地址]
3)双字寻址(32 bit)
双字寻址由存储区标识符、双字标识符及字节起始地址组合而成。如VD100,其双字寻址方式如图所示。
双字寻址的格式:[区域标识][双字标识符].[字节起始地址]
为使用方便和使数据与存储器单元长度统一,S7-200系列中,一般存储单元都具有位寻址、字节寻址、字寻址及双子寻址4种寻址方式。寻址时,不同的寻址方式情况下,选用同一字节地址作为起始地址时,其所表示的地址空间是不同的。
在S7-200中,一些存储数据专用的存储单元不支持位寻址方式,主要有模拟量输入/输出、累加器、定时器和计数器的当前值存储器等。而累加器不论采用何种寻址方式,都要占用32位,模拟量单元寻址时均以偶数标志。此外,定时器、计数器具有当前值存储器及位存储器,属于同一个器件的存储器采用同一标号寻址。

PLC电源模块及其它外设的选择
1.电源模块的选择 电源模块的选择较为简单,只需考虑电源的额定输出电流就可以了。电源模块的额定电流必须大于CPU模块、I/O模块、及其它模块的总消耗电流。电源模块选择仅对于模块式结构的PLC而言,对于整体式PLC不存在电源的选择。
2.编程器的选择 对于小型控制系统或不需要在线编程的PLC系统,一般选用价格便宜的简易编程器。对于由中、**PLC构成的复杂系统或需要在线编程的PLC系统,可以选配功能强、编程方便的智能编程器,但智能编程器价格较贵。如果有现成的个人计算机,可以选用PLC的编程软件包,在个人计算机上实现编程器的功能。
3.写入器的选择 为了防止因干扰使锂电池电压变化等原因破坏RAM中的用户和程序,可选用EPROM写入器,通过它将用户程序固化在EPROM中。现在有些PLC或其编程器本身就具有EPROM写入器的功能。
供我国使用的PLC的供电电源有两种形式:交流220V 电源和直流供电电源(多为24V)。图0提供的端子图为交流供电,如图1所示。图中L表示火线、N表示零线, 表示接地。交流供电的PLC提供辅助直流电源,供输入设备和部分扩展单元用。FX2N系列PLC的辅助电源容量为250~460mA。在容量不够的情况下,需要单独提供直流电源。

采用直流电源供电如图2所示,这类PLC的端子上不再提供辅助电源。

|
逻辑操作 |
|
|
ALD OLD |
电路块串联 电路块并联 |
|
LPS LRD LPP LDS |
入栈 读栈 出栈 装载堆栈 |
|
AENO |
对ENO进行与操作 |
|
ANDB IN1,OUT ANDW IN1,OUT ANDD IN1,OUT |
字节逻辑与 字逻辑与 双字逻辑与 |
|
ORB IN1,OUT ORW IN1,OUT ORD IN1,OUT |
字节逻辑或 字逻辑或 双字逻辑或 |
|
XORB IN1,OUT XORW IN1,OUT XORD IN1,OUT |
字节逻辑异或 字逻辑异或 双字逻辑异或 |
|
INVB OUT INVW OUT INVD OUT |
字节取反(1的补码) 字取反 双字取反 |
|
表、查找和转换指令 |
|
|
ATT TABLE,DATA |
把数据加到表中 |
|
LIFO TABLE,DATA FIFO TABLE,DATA |
从表中取数据,后入先出 从表中取数据,先入先出 |
|
FND= TBL,PATRN,INDX FND<> TBL,PATRN,INDX FND< TBL,PATRN,INDX FND> TBL,PATRN,INDX |
在表中查找符合比较条件的数据 |
|
BCDI OUT IBCD OUT |
BCD码转换成整数 整数转换成BCD码 |
|
BTI IN,OUT IBT IN,OUT ITD IN,OUT TDI IN,OUT |
字节转换成整数 整数转换成字节 整数转换成双整数 双整数转换成整数 |
|
DTR IN,OUT TRUNC IN,OUT ROUND IN,OUT |
双整数转换成实数 实数四舍五入为双整数 实数截位取整为双整数 |
|
ATH IN,OUT,LEN HTA IN,OUT,LEN ITA IN,OUT,FMT DTA IN,OUT,FMT RTA IN,OUT,FMT |
ASCII码→16进制数 16进制数→ASCII码 整数→ASCII码 双整数→ASCII码 实数→ASCII码 |
|
DECO IN,OUT ENCO IN,OUT |
译码 编码 |
|
SEG IN,OUT |
7段译码 |
|
中断指令 |
|
|
CRETI |
从中断程序有条件返回 |
|
ENI DISI |
允许中断 禁止中断 |
|
ATCH INT,EVENT DTCH EVENT |
给事件分配中断程序 解除中断事件 |
|
通信指令 |
|
|
XMT TABLE,PORT RCV TABLE,PORT |
自由端口发送 自由端口接收 |
|
NETR TABLE,PORT NETW TABLE,PORT |
网络读 网络写 |
|
GPA ADDR,PORT SPA ADDR,PORT |
获取端口地址 设置端口地址 |
|
高速计数器指令 |
|
|
HDEF HSC,MODE |
定义高速计数器模式 |
|
HSC N |
激活高速计数器 |
|
PLS X |
脉冲输出 |
|
数学、加1减1指令 |
|
|
+I IN1,OUT +D IN1,OUT +R IN1,OUT |
整数,双整数或实数法 IN1+OUT=OUT |
|
-I IN1,OUT -D IN1,OUT -R IN1,OUT |
整数,双整数或实数法 OUT-IN1 =OUT |
|
MUL IN1,OUT *R IN1,OUT *I IN1,OUT *D IN1,OUT |
整数乘整数得双整数 实数、整数或双整数乘法 IN1×OUT=OUT |
|
MUL IN1,OUT /R IN1,OUT /I IN1,OUT /D IN1,OUT |
整数除整数得双整数 实数、整数或双整数除法 OUT/IN1=OUT |
|
SQRT IN,OUT |
平方根 |
|
LN IN,OUT |
自然对数 |
|
LXP IN,OUT |
自然指数 |
|
SIN IN,OUT |
正弦 |
|
COS IN,OUT |
余弦 |
|
TAN IN,OUT |
正切 |
|
INCB OUT INCW OUT INCD OUT |
字节加1 字加1 双字加1 |
|
DECB OUT DECW OUT DECD OUT |
字节减1 字减1 双字减1 |
|
PID Table,Loop |
PID回路 |
|
定时器和计数器指令 |
|
|
TON Txxx,PT TOF Txxx,PT TONR Txxx,PT |
通电延时定时器 断电延时定时器 保持型通延时定时器 |
|
CTU Txxx,PV CTD Txxx,PV CTUD Txxx,PV |
加计数器 减计数器 加/减计数器 |
|
实时时钟指令 |
|
|
TODR T TODW T |
读实时时钟 写实时时钟 |
|
程序控制指令 |
|
|
END |
程序的条件结束 |
|
STOP |
切换到STOP模式 |
|
WDR |
看门狗复位(300 ms) |
|
JMP N LBL N |
跳到指定的标号 定义一个跳转的标号 |
|
CALL N(N1,…) CRET |
调用子程序,可以有16个可选参数 从子程序条件返回 |
|
FOR INDX,INIT,FINAL NEXT |
For/Next循环 |
|
LSCR N SCRT N SCRE |
顺控继电器段的启动 顺控继电器段的转换 顺控断电器段的结束 |
PLC的扫描周期包括上电后初始处理、共同处理、上位链接服务、外设服务、运算处理、I/O刷新。
PLC输入/输出响应滞后的现象及其影响分析
当PLC的输入端输入信号发生变化PLC输出端对该输入变化做出反应需要一段时间,这种现象称为PLC输入/输出响应滞后。
由上述分析可知,扫描周期的长短主要取决于程序的长短。扫描周期越长,响应速度越慢。由于每一个扫描周期只进行一次I/O刷新,即每一个扫描周期PLC只对输人、输出状态寄存器更新一次,故使系统存在输人、输出滞后现象,这在一定程度上降低了系统的响应速度。工业现场的干扰常常是脉冲式的、短时的,PLC的输入/输出响应滞后,对一般的工业控制要求,是完全允许的,还可以起到增强系统的抗干扰能力。
但是,对于控制时间要求严格、响应速度要求较快的系统,就要采取措施减小输入/输出滞后的不利影响。
用S7-200控制可双向运转的三相感应电动机
可逆电动机起动器电路一一适用于改变三相交流感应电动机旋转方向
这个示例程序用于控制可双向运转的三相感应电动机。
当与输入点I0.0相连的左转点动开关(Le)闭合时,电动机逆时针方向旋转,当与输入点I0.1相连的右转点动开关(Ri)闭合时,电动机顺时针方向旋转。但这要有一个前题,即与输入点I0.3相连的电动机电路断路器和与输入点I0.2相连的停机开关(OFF)都没有动作。只有按下停机开关,并等待5秒钟之后,才可以改变电动机的旋转方向。这样做是为了让电动机有足够的时问刹车停转,然后再反向起动,如果需要电动机反转的话。如
果与I0.0和I0.1相连的点动开关同时按下,电动机停转,并且小起动。

程序框图

程序和注释
在程序起始部分,程序检查是否必须激活互锁电路。互锁电路防比电动机误起动,或者按错误方向起动。只有当所有点动开关都没有动作(位于起始状态)或者等待时问溢出时,互锁才清除,即M2.0被置成逻辑0.
如果电动机断路器(输入点10.3)没有动作,停机点动开关(输入点10.2)也没有动作(这两个触点都是常闭触点);并且状态位M1门没有被设置成顺时针旋转标志,则使能位M 2.1被置为逻辑1。电动机才有可能逆时针旋转。代表逆时针旋转的状态位是M1.0。用类似方法可得到顺时针方向旋转的起动条件。
当点动起动开关(1e和Ri)这一动作,并且互锁位和状态位都没有被设置成相反的旋转方向时,电动止起动。即相关的输出位和状态位被置位,状态位的作用是使输出能够自保。电动止逆时针方向旋转起动器由输出点Q0.0控制。电动机顺时针方向旋转起动器由输出点Q0.1控制。
除此外,另有一组信号灯指示电动机当前的运行状态;逆时针方向旋转指示灯(Le)与输出点00.4相连;顺时针方向旋转指示灯(Ri)与输出点00.3相连;关电机指示灯(OFF)与输出点00.2相连。
当电动机被停机时,"ED”的下降沿将辅助存储位M 2.3置为1,进入停机模式。当M 2.3被置位时,限制电动机再次起动的定时器开始计时,该定时器的预置时问是5秒(500 X10ms),经过5秒钟后,内部存储器位M 2.3被复位。在这段强制等待时问内与输出点Q0.5相连的信号灯(Wait)闪烁。如果状态位都没有被置位,则点亮与输出点00.2相连的停止状态指示灯(OFF)。
该程序的长度为61个字。


PLC控制系统设计时应遵循的主要步骤和内容
(1)工艺分析
深入了解控制对象的工艺过程、工作特点、控制要求,并划分控制的各个阶段,归纳各个阶段的特点,和各阶段之间的转换条件,画出控制流程图或功能流程图。
(2)选择合适的PLC类型
在选择PLC机型时,主要考虑下面几点:
1 功能的选择。 对于小型的PLC主要考虑I/O扩展模块、A/D与D/A模块以及指令功能(如中断、PID等)。
2 I/O点数的确定。 统计被控制系统的开关量、模拟量的I/O点数,并考虑以后的扩充(一般加上10%~20%的备用量),从而选择PLC的I/O点数和输出规格。
3 内存的估算。 用户程序所需的内存容量主要与系统的I/O点数、控制要求、程序结构长短等因素有关。一般可按下式估算:存储容量=开关量输入点数×10+开关量输出点数×8+模拟通道数×100+定时器/计数器数量×2+通信接口个数×300+备用量。
(3)分配I/O点。 分配PLC的输入/输出点,编写输入/输出分配表或画出输入/输出端子的接线图,接着就可以进行PLC程序设计,同时进行控制柜或操作台的设计和现场施工。
(4)程序设计。 对于较复杂的控制系统,根据生产工艺要求,画出控制流程图或功能流程图,然后设计出梯形图,再根据梯形图编写语句表程序清单,对程序进行模拟调试和修改,直到满足控制要求为止。
(5)控制柜或操作台的设计和现场施工。 设计控制柜及操作台的电器布置图及安装接线图;设计控制系统各部分的电气互锁图;根据图纸进行现场接线,并检查。
(6)应用系统整体调试。如果控制系统由几个部分组成,则应先作局部调试,然后再进行整体调试;如果控制程序的步序较多,则可**行分段调试,然后连接起来总调。
(7)编制技术文件。技术文件应包括:可编程控制器的外部接线图等电气图纸,电器布置图,电器元件明细表,顺序功能图,带注释的梯形图和说明。